 2015-05-05
2015-05-05 4164
4164Электромеханическая характеристика  может быть получена непосредственно из схемы замещения (рис. 3.20):
может быть получена непосредственно из схемы замещения (рис. 3.20):
 . (3.34)
. (3.34)
Если требуется электромеханическая характеристика  , следует воспользоваться уравнением намагничивающих сил
, следует воспользоваться уравнением намагничивающих сил  и векторной диаграммой (рис. 3.21).
и векторной диаграммой (рис. 3.21).
Механическую характеристику асинхронного двигателя М = f (S) рассчитывают по формуле
 , (3.35)
, (3.35)
где m 1 – число фаз (для трехфазного двигателя m = 3);
РМ – электромагнитная мощность.
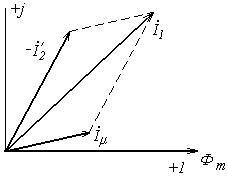
Рис. 3.21. Векторная диаграмма токов
Подстановка  из (3.34) в (3.35) дает выражение механической характеристики через параметры двигателя:
из (3.34) в (3.35) дает выражение механической характеристики через параметры двигателя:
 . (3.36)
. (3.36)
Механическая характеристика, соответствующая (3.36) при S > 0 и S < 0, приведена на рис. 3.22.
Механическая характеристика имеет две точки экстремума с координатами  ,
,  и
и  ,
,  в двигательном и генераторном режимах.
в двигательном и генераторном режимах.
Величину критического скольжения SK, соответствующего критическому (максимальному) моменту, определяют из условия  :
:
 . (3.37)
. (3.37)
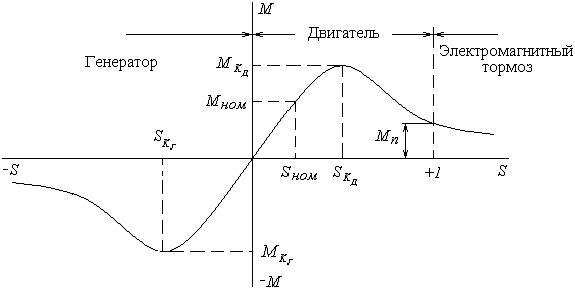
Рис. 3.22. Механическая характеристика асинхронного двигателя
Подстановка SK из (3.37) в (3.36) дает выражение для критического момента:
 . (3.38)
. (3.38)
В (3.38) знак плюс относится к двигательному режиму, знак минус – к генераторному.
Критический момент в соответствии с (3.38) не зависит от активного сопротивления ротора. Увеличение активного сопротивления ротора  ведет к перемещению критического момента в область больших значений SK.
ведет к перемещению критического момента в область больших значений SK.
Электромагнитный момент при S = + 1 называется пусковым:
 . (3.39)
. (3.39)
Если разделить (3.36) на (3.38), после преобразования можно получить так называемую уточненную формулу Клосса для построения механической характеристики:
 , (3.40)
, (3.40)
где  .
.
Если возможно пренебречь величиной R 1, то при а = 0 формула Клосса примет вид:
 . (3.41)
. (3.41)
Для двигателей малой мощности величины R 1 и xК соизмеримы и не учитывать R 1 нельзя.
При скольжениях S << SK (т.е. в области рабочей точки ωном; Мном) механическая характеристика практически линейна
 .
.
При скольжениях механическая S >> SK характеристика нелинейна
 .
.
Естественная механическая характеристика для двигательного режима, используемая в практике электропривода M = f (ω), определяется по зависимости M = f (S) и выражению  (рис. 3.23).
(рис. 3.23).
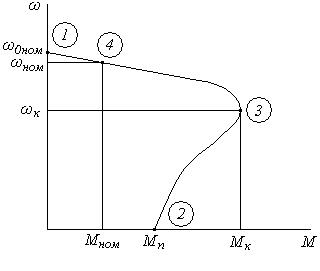
Рис. 3.23. Механическая характеристика асинхронного двигателя
Естественная механическая характеристика имеет четыре характерные точки, координаты которых определяются каталожными данными конкретного двигателя.
Точка 1. ω 0 ном ; М = 0.
Точка 2. М = МП при U 1 = U 1 ном и f 1; ω = 0.
Точка 3. М = МК при U 1 = U 1 ном и f 1; ω = ωК;
Точка 4. М = Мном; ω = ωном.
Номинальная скорость вращения магнитного поля, или синхронная скорость, определяется при номинальной частоте f 1 числом пар полюсов двигателя:
 .
.
Число полюсов 2ּ р входит в обозначение типа двигателя.
Величину максимального (критического) момента в двигательном режиме определяют по перегрузочной способности
 ,
,
в которой номинальный момент рассчитывают по формуле:
 ; (3.42)
; (3.42)
 , (3.43)
, (3.43)
если в каталоге указана номинальная частота вращения nном, об/мин.
Величину пускового момента определяют по его кратности  .
.
Критическая скорость  определяется критическим
определяется критическим
скольжением SK, величину которого можно рассчитать по номинальным данным:
 , (3.44)
, (3.44)
где  .
.
Формула (3.44) получена из упрощенной формулы Клосса (при R 1 = 0) при номинальном напряжении
 ,
,
в которой критический момент в соответствии с (3.38) равен
 . (3.45)
. (3.45)
В тех случаях, когда величиной активного сопротивления обмотки статора пренебречь нельзя (для двигателей малой мощности до 10 кВт) можно использовать формулу:
 ,
,
где  .
.
Искусственные механические характеристики асинхронных двигателей при переменных значениях напряжения, подводимого к обмоткам статора, частоты тока в обмотках, скольжения и параметров схемы замещения рассчитывают по уравнениям (3.36), (3.38), (3.39), (3.41), (3.44).
На рис. 3.24, а, б, в, г приведены естественная и искусственные механические характеристики.
Искусственные характеристики могут быть использованы для регулирования скорости асинхронных двигателей, ограничения пусковых токов и увеличения пусковых моментов.
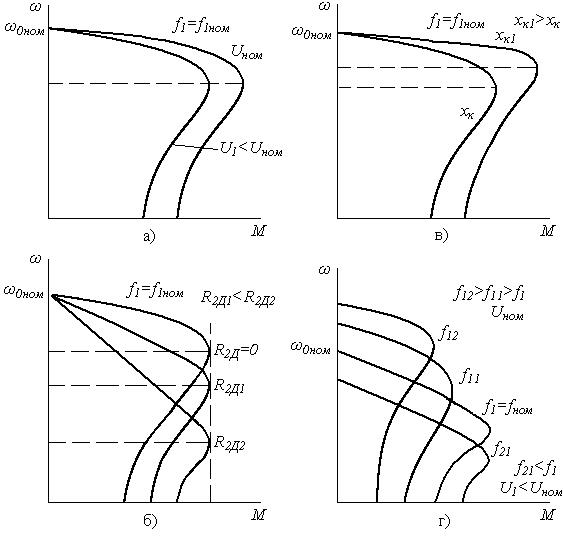
Рис. 3.24. Естественная и искусственные механические характеристики асинхронного двигателя: а – при снижении напряжения; б, в – при изменении параметров двигателя хК и R 2Σ; г – при изменении частоты и напряжения

