 2015-05-06
2015-05-06 3392
3392
Дифференциальные уравнения движения точки
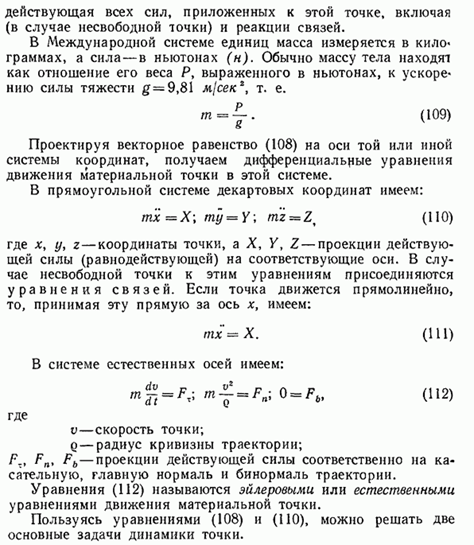
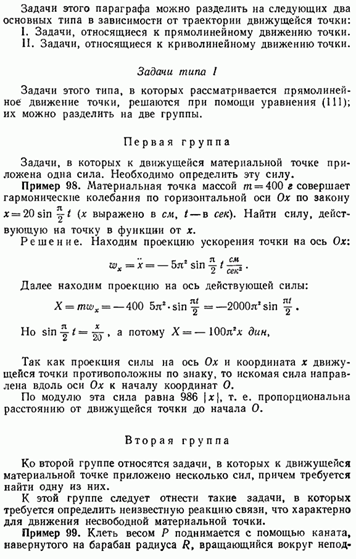
Две основные задачи динамики материальной точки. Первая основная задача динамики.
 |
4 Вторая основная задача динамики. Случаи силы зависящей только от времени, только от скорости и только от координаты


Случаи силы зависящей только от времени, только от скорости и только от координаты
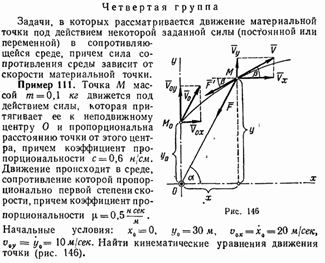
Движение м.т. под действием силы, зависящей только от скорости
Движение м.т. под действием силы f = f (v), зависящей только от скорости, происходит по закону:
w = f (v)/ m
В общем случае направление вектора w может не совпадать с направлением вектора скорости v. Но в данном случае мы рассматриваем одномерное движение. В противном случае сила будет зависеть от направления движения.
Для получения уравнения движения необходимо решить в общем случае нелинейное дифференциальное уравнение первого порядка относительно v:
dv / dt = f (v)/ m
∫ m / f (v) dv = ∫ dt
При ГПТК скорость преобразуется как вектор–скорость, но сила не должна измениться:
f '(v ') = f (v ' + v 0) = f (v)
В 3-мерном пространстве уравнение движения состоит из системы трех независимых уравнений, каждая из которых решается независимо от других.
Простейшей зависимостью такой силы от скорости является линейная:
dv / dt = – k (v – v 0)
где k – коэффициент сопротивления движению,
v 0 – некоторая постоянная скорость, зависящая от с.о., или собственная скорость среды движению м.т. Параметр v 0 может быть полем скорости сопротивляющейся среды.
Решим ее для постоянного v 0:
dv /(v – v 0) = – k dt
Проинтегрируем ее между точками t и t 0 при v > v 0:
ln(v (t) – v 0) = – k (t – t 0)
v (t) – v 0 = –exp(– k (t – t 0))
v (t) = v 0 – exp(– k (t – t 0))
При k < 0 движение происходит с приближением значения скорости м.т. к скорости v 0, но эта скорость никогда не достигнет значения, равного v 0, в силу свойств экспоненциальной функции: v 0 – это скорость выделенной с.о., в которой скорость м.т. со временем стремится к нулевому значению, т.е. останавливается.
Разрешим уравнение относительно координаты r:
r (t) = r 0 + ∫ v dt
r (t) = r 0 + ∫(v 0 – exp(– k (t – t 0))) dt =
= r 0 + v 0 (t – t 0) + (exp(– k (t – t 0)) – 1)/ k
При k < 0, v 0 = 0 и t → ∞ движение происходит с замедлением и бесконечным стремлением к некоторой границе, в силу свойств экспоненциальной функции:
rmax = l im t →∞[ r 0 + (exp(– k (t – t 0)) – 1)/ k ] =
= r 0 +1/ k
Еще одна простейшая зависимость такой силы от скорости – тоже линейная, но всегда направленная перпендикулярно вектору скорости и некоторому направлению H:
f = e [ v ´ H ]
Под действием такой силы м.т. будет двигаться по окружности некоторого радиуса R, определяемой из уравнения:
e [ v ´ H ] = mv 2/ R
R = m / e · v 2/[ v ´ H ]
При наличии начальной тангенциальной скорости м.т. к направлению H м.т. будет двигаться одновременно по винтовой линии со скоростью в направлении H, равной начальной тангенциальной скорости м.т.

