 2015-05-06
2015-05-06 702
702Обобщенными координатами мы будем называть параметры, которые определяют положение материальной системы.
Это могут быть обычные декартовы координаты точек, углы поворота, расстояния, площади, объемы и т.д.
Так на рис.69 положение балочки АВ и всех ее точек вполне определяется углом  .
.
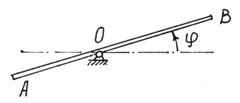
Рис.69
Положение точек кривошипно-шатунного механизма (рис.70) можно определить заданием угла поворота кривошипа или расстоянием s, определяющим положение ползуна В (при  ).
).
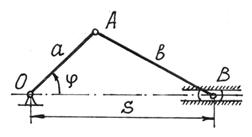
Рис.70
Положение сферического маятника (рис.71) определяется заданием двух параметров, углов  и
и  .
.
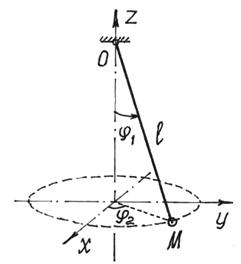
Рис.71
Минимальное количество независимых друг от друга обобщенных координат, которых достаточно, чтобы полностью и однозначно определить положение всех точек системы, называют числом степеней свободы этой системы.
Вообще для любой материальной системы можно назначить несколько обобщенных координат. Например, у кривошипно-шатунного механизма (рис.70) указаны две обобщенные координаты и  . Но это не значит, что у механизма две степени свободы, так как одну координату можно определить через другую:
. Но это не значит, что у механизма две степени свободы, так как одну координату можно определить через другую:
 .
.
А вот у маятника (рис.71) две степени свободы, т.к. определяется его положение двумя независимыми обобщенными координатами. Кстати, если длина маятника изменяется, то для определения положения точки М потребуется еще один параметр – обобщенная координата l, длина нити. И у маятника станут три степени свободы.
Обобщенные координаты в общем случае будем обозначать буквой q.
Пусть материальная система имеет s степеней свободы. Положение ее определяется обобщенными координатами: q 1, q 2, q 3,…, qk,…, qs. .
Нетрудно убедиться, что декартовы координаты n точек системы можно определить как функции обобщенных координат и времени:

 (5)
(5)


Так у маятника (рис.71) координаты точки М
есть функции координат l, и , и времени t, если l = l(t).
Соответственно, и радиус-вектор точек системы можно определить как функцию обобщенных координат и времени:

 (6)
(6)








