 2015-05-06
2015-05-06 364
364При изучении равновесия системы тел методами так называемой геометрической статики приходится рассматривать равновесие каждого из тел в отдельности, заменяя наложенные связи соответствующими наперед неизвестными реакциями. Когда число тел в системе велико, этот путь становится весьма громоздким и связан с необходимостью решать большое число уравнений со многими неизвестными.
Отличительная особенность метода, вытекающего из принципа возможных перемещений, состоит в том, что при его применении эффект действия связей учитывается не путем введения неизвестных наперед реакций, а путем рассмотрения перемещений, которые можно сообщить точкам системы, если вывести систему из занимаемого ею положения. Эти перемещения называют в механике возможными(или виртуальными)перемещениями.
Возможные перемещения точек системы должны удовлетворять двум условиям: 1) они должны быть бесконечно малыми,так как при конечных перемещениях система перейдет в другое положение, где условия равновесия могут быть другими; 2) они должны быть такими, чтобы при этом все наложенные на систему связи сохранялись,так как иначе мы изменим, вид рассматриваемой механической системы (системастанет другой).
Например, для кривошипно-шатунного механизма, изображенного на рис.33 перемещение точек кривошипа ОА в положение ОА1 нельзя рассматривать как возможное, так как в этом положении условия равновесия механизма под действием сил  и
и  будут уже другими. Точно так же нельзя считать возможным даже бесконечно малое перемещение точки В шатуна вдоль линии BD; оно было бы возможным, если в точке В вместо ползуна была бы качающаяся муфта, т.е. когда механизм был бы другим.
будут уже другими. Точно так же нельзя считать возможным даже бесконечно малое перемещение точки В шатуна вдоль линии BD; оно было бы возможным, если в точке В вместо ползуна была бы качающаяся муфта, т.е. когда механизм был бы другим.
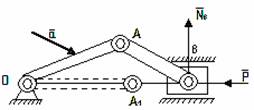
Рис. 33
Таким образом, возможным перемещением системы мы будем называть любую совокупность бесконечно малых перемещений точек системы, допускаемых в данный момент всеми наложенными на систему связями. Возможное перемещение любой точки системы будем изображать элементарным вектором d  , направленным в сторону перемещения.
, направленным в сторону перемещения.
В общем случае для точек и тел системы может существовать множество возможных различных перемещений (перемещения d  .и – d мы не считаем разными). Однако для каждой системы, в зависимости от характера наложенных на нее связей, можно указать определенное число таких независимых между собой перемещений, что всякое другое возможное перемещение будет получаться как геометрическая сумма. Например, шарик, лежащий на какой-нибудь плоскости (или поверхности), можно переместить вдоль этой плоскости по множеству направлений. Однако любое его возможное перемещение d можно получить как сумму двух перемещений d
.и – d мы не считаем разными). Однако для каждой системы, в зависимости от характера наложенных на нее связей, можно указать определенное число таких независимых между собой перемещений, что всякое другое возможное перемещение будет получаться как геометрическая сумма. Например, шарик, лежащий на какой-нибудь плоскости (или поверхности), можно переместить вдоль этой плоскости по множеству направлений. Однако любое его возможное перемещение d можно получить как сумму двух перемещений d  и d
и d  вдоль лежащих в этой плоскости взаимно перпендикулярных осей (d =d + d ).
вдоль лежащих в этой плоскости взаимно перпендикулярных осей (d =d + d ).
Число независимых между собою возможных перемещений системы называется числом степеней свободы этой системы.Так, рассмотренный выше шарик на плоскости (или на поверхности), если его считать материальной точкой, имеет 2 степени свободы. У кривошипно-шатунного механизма будет, очевидно, одна степень свободы.
У свободной материальной точки – 3 степени свободы (независимыми будут 3 перемещения вдоль взаимно перпендикулярных осей). Свободное твердое тело имеет 6 степеней свободы (независимыми перемещениями будут: 3 поступательных перемещения вдоль осей координат и 3 вращательных вокруг этих осей).








