 2015-04-23
2015-04-23 1272
1272В зависимости от типа выбранной электроизмерительной схемы указатель дистанционного манометра может представлять собой гальванометр, логометр или следящий электропривод. Поскольку на летательных аппаратах преимущественное применение нашли логометрические дистанционные манометры, ограничимся рассмотрением схем и конструкций указателей логометрического типа. На рис. 6.20, а показан указатель электрического дистанционного манометра, содержащий магнитоэлектрический логометр и электрические сопротивления R1 R2, R3, R4 и Rдр, входящие в схему рис. 6.17, б.
Конструктивная схема магнитоэлектрического логометра показана на рис. 6.20, б. Логометр имеет две неподвижные прямоугольные проволочные рамки 3 и 10, расположенные под углом 120° и охватывающие медный корпус успокоителя 1, внутри которого помещена подвижная система, состоящая из постоянного магнита 2, связанного с указывающей стрелкой 5. Ось 9 подвижной системы имеет с обоих концов керны 11, опирающиеся на подпятники 6. Рамки помещены внутрь цилиндрического пермаллоевого экрана 8, защищающего подвижную систему от влияния внешних магнитных полей.
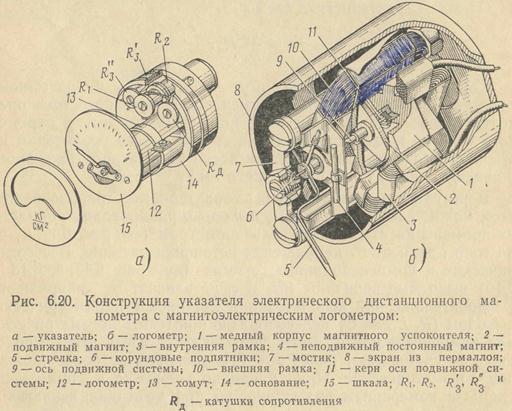
Рамки логометра при протекании по ним токов i1 и i2 создают два направленных под углом 120° магнитных поля, замыкающихся через экран. Для приведения стрелки на нуль при отключении питания в логометре имеется неподвижный постоянный магнит 4, создающий слабое магнитное поле напряженностью  .
.
Длина подвижного магнита значительно меньше диаметра экрана. Поэтому в рабочей зоне, где поле взаимодействует с подвижным магнитом, магнитные поля каждой из рамок можно охарактеризовать векторами напряженности Н1 и H2, направленными по осям А А' и В В' под углом 120° по отношению друг к другу (рис. 6.21).
Величина векторов напряженности

где  - число витков каждой из рамок.
- число витков каждой из рамок.
Напряженность результирующего магнитного поля в рабочей зоне определяется геометрической суммой векторов

Подвижный магнит вместе с указывающей стрелкой располагается по направлению вектора Н (если не учитывать влияние ).

Если принять за начало отсчета ( = 0) напряжение, совпадающее с осью вектора H1, то текущий угол отклонения стрелки определится из уравнения
= 0) напряжение, совпадающее с осью вектора H1, то текущий угол отклонения стрелки определится из уравнения
где  — угол между рамками ( = 120°).
— угол между рамками ( = 120°).
Заменяя  , находим
, находим
где

Уравнение (6.18) и является характеристикой магнито-электрического логометра с подвижным магнитом, входной величиной которого является  , а выходной .
, а выходной .
Стрелка расположена посредине шкалы ( = 60°) при равенстве токов в рамках (i1=i2=i).
При этом составляющие напряженности магнитного поля

 (D —внутренний диаметр экрана), а результирующая напряженность
(D —внутренний диаметр экрана), а результирующая напряженность

Рассматривая систему «подвижный магнит — магнитное поле» как «магнитную пружину», можно представить логометр как динамическое колебательное звено с передаточной функцией:
где CЖ — угловая жесткость «магнитной пружины», равная СЖ = Нтм (Н — напряженность результирующего магнитного поля внутри логометра; тм — магнитный момент подвижного магнита);
К д — коэффициент демпфирования;
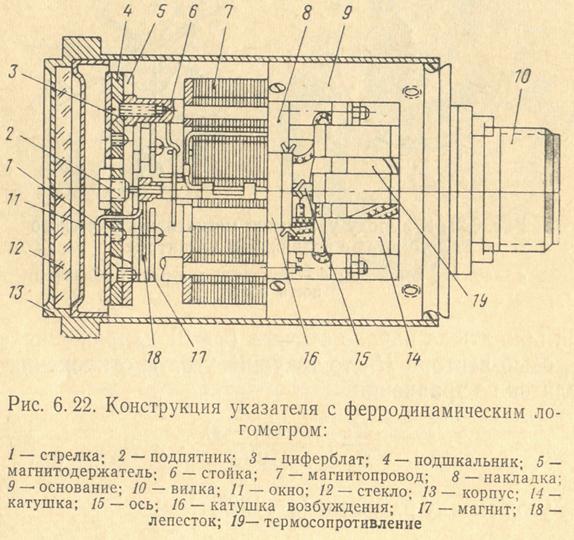
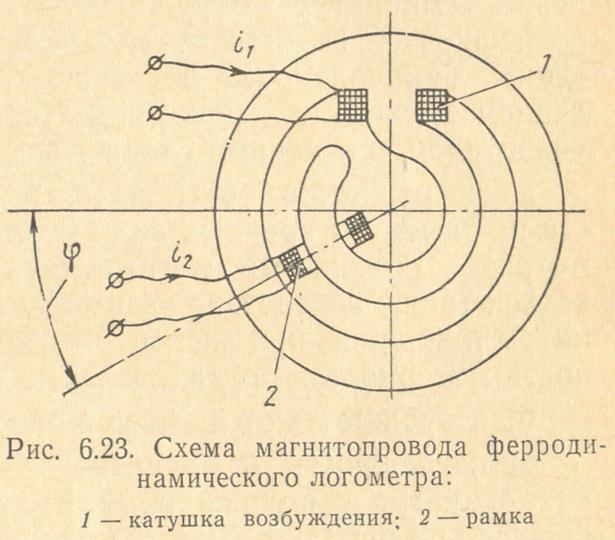
J — момент инерции подвижной системы. Конструкция указателя с ферродинамическим логометром приведена на рис. 6.22, а схема магнитопровода этого логометра показана на рис. 6.23.
Подвижная рамка 2 подвержена действию двух механических моментов M1 и М2. Момент М1, который условно назовем вращающим, создается за счет взаимодействия электрического тока 4, протекающего по рамке 2, с магнитным полем, создаваемым в рабочем зазоре током i1 катушки возбуждения 1. Момент М2, являющийся противодействующим, образуется в результате стремления рамки 2 втянуть в себя железный сердечник.
Направление витков рамки 2 выбирается таким образом, чтобы момент М1 был направлен навстречу моменту М2. Тогда положение равновесия подвижной системы логометра будет определяться равенством M1 = M2.
Для определения характеристики ферродинамического логометра положим, что токи i1 и i2 синфазны (это условие является необходимым для правильной работы логометра):

где I1 и I2 – амплитудные значения токов i1 и i2;
f – частота переменного тока.
При насыщенном магнитопроводе магнитная индукция поля, создаваемого в рабочем зазоре током i1, пропорциональна величине этого тока и, кроме того, зависит от угла поворота рамки 2. Вращающий момент определяется при этом выражением

Противодействующий момент пропорционален квадрату силы тока i2 и зависит также от угла :

Приравнивая М1=М2, получим условие равновесия в виде:

откуда

или
 .
.
Полученное выражение показывает, что при ненасыщенном магнитопроводе и синфазных токах i1 и i2 угол поворота подвижной системы ферродинамического логометра является функцией отношения амплитудных значений этих токов.








