 2015-04-30
2015-04-30 1110
1110В инженерной практике рассматриваются технические системы, которые представляют собой комплекс взаимосвязанных технических средств, обеспечивающих преобразование массы, энергии и информации. Существенным элементом при этом является установление отношений между входами и выходами технических средств. Комплекс этих отношений и образует систему.
Выделяют два типа отношений: отношения преобразования и отношения связей. Отношения преобразования включают отношения переработки (информации, массы, с изменением свойств материала (внутренней и внешней структуры), преобразование энергии) и отношения перемещения (изменение положения предмета по отношению к другим предметам). Отношение связи – это то, что объединяет функциональные элементы технической системы в одно целое.
Они бывают только жесткими, т.е. не изменяющимися, в процессе функционирования системы. Через связи проходит интенсивный обмен веществом, энергией и информацией с окружающей средой и между элементами технической системы. Отношения связи отражают все взаимоотношения в технической системе и не обладают собственной материальной основой.
Для описания отношений в системах используется форма записи, называемая графом. В этой форме записи отношения преобразования соответствуют вершинам графа. Второй элемент графа - ребра (отрезки, соединяющие вершины) обозначают отношения связей. (44) Пример графа представлен на рисунке 3.
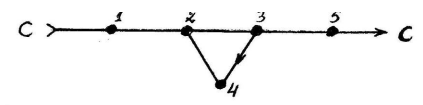
Рисунок 3
При этом стоит отметить, что сложные системы могут быть представлены несколькими графическими моделями, отражающими различные свойства и характеристики систем.
О Шаи в своей книге «THE MULTIDISCIPLINARY COMBINATORIAL APPROACH AND ITS APPLICATIONS IN ENGINEERING» выделяет следующие типы графических моделей систем:
1. Линейная модель;
2. Модель потенциалов;
3. Модель потоков;
4. Модель устойчивости (сопротивления). (43)
Для физических систем, допускающих идеализированное представление в виде схем с сосредоточенными компонентами широко используются структурные модели в форме графов. Соединение между собой компонентов таких систем осуществляется путем объединения их полюсов, образующих узлы схемы. В зависимости от числа полюсов различают двухполюсные и многополюсные компоненты, которые так и называют двухполюсниками и многополюсниками.
Типичными представителями физических систем такого типа могут служить электрические и электронные цепи, в которых резисторы, конденсаторы и катушки индуктивности являются двухполюсниками, а трансформаторы, электронные лампы, транзисторы многополюсниками. Аналогичные компоненты можно выделить в системах различной физической природы: механических, акустических, гидравлических, тепловых и т.д.
Для математического описания состава и структуры физической системы используются два типа соотношений:
1) полюсные уравнения, характеризующие индивидуальные свойства каждой компоненты вне возможных соединений с другими компонентами;
2) уравнения связей, отражающие характер соединения различных компонент в схеме вне зависимости к их индивидуальным свойствам.
Уравнением двухполюсника служит функциональная зависимость между двумя физическими величинами, характеризующими его состояние (например, между током и напряжением электрического двухполюсника, силой и скоростью механического двухполюсника и т.п.). Многополюсник описывается системой уравнений, связывающей физические величины на его полюсах. Часто он представляется схемной моделью, состоящей из двухполюсных компонентов, каждый из которых описывается соответствующей функциональной зависимостью, в которой могут содержаться величины, связанные с другими компонентами схемной модели.
В роли уравнений связи обычно выступают фундаментальные физические законы, выражающие условия равновесия и непрерывности (законы Кирхгофа для электрических цепей, принцип Даламбера для механических систем и т.п.). Эти уравнения получают из рассмотрения структуры схемы, причем они должны содержать те же величины, что и полюсные уравнения, характеризующие состояние двухполюсников, обеспечивая совместность исходных уравнений, преобразование которых позволяет получить математическую модель системы в требуемой форме. (44)
Рассмотрим одну из таких моделей на примере электрической цепи.
Существуют три типа пассивных электрических двухполюсников: сопротивление, ёмкость и индуктивность. Пассивными они называются потому, что рассеивают или накапливают энергию.
Сопротивление – компонент, в котором происходит необратимое преобразование электрической энергии в тепло. Зависимость между током (поперечная переменная) и напряжением (продольная переменная) может быть представлена в одной из двух форм: i * R (t)=G*U*R (t) или U*R (t)=Ri *R (t), где параметры G – проводимость,
R – сопротивление (G=R -1 и R=G -1).
Емкость – компонент, накапливающий электрическую энергию. Заряд q(t) связан с напряжением U С (t) на линейной емкости соотношением q(t)=CU C (t), где С – параметр, называемый емкостью.
Индуктивность – компонент, накапливающий магнитную энергию.
Магнитный поток ψ (t) линейной индуктивности пропорционален, протекающему в ней току i L (t), т.е. ψ (t)=Li L (t), где L – параметр, называемый индуктивностью.
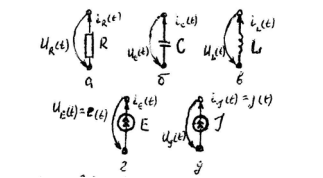
Рисунок 4
Идеальные электрические двухполюсники: а – резистор; б – конденсатор; в – катушка индуктивности; г – источник напряжения; д – источник тока.
Источники энергии в электрических цепях представляются идеальными двухполюсниками двух типов. Источник напряжения – двухполюсник (рис. 4.г), напряжение в котором определяется некоторой функцией времени е(t) и не зависит от протекающего по нему тока, т.е. U E (t)=e(t). Источник тока – двухполюсник (рис. 4.д), ток в котором также определяется некоторой функцией времени j(t) и не зависит от приложенного напряжения, т.е. i J (t)=j(t).
Для построения графа электрической схемы достаточно ее узлы рассматривать как вершины, а каждый двухполюсник заменить ребром, сохраняя отношение инцидентности. Следует иметь в виду, что при изображении электрических схем линии означают проводники без сопротивления, и узлы, соединенные такими линиями, являются по существу одним узлом. Узлы, с которыми связаны только два двухполюсника, на схемах обычно не отмечаются (рис. 5.а, узел а).
Направления дуг пассивных двухполюсников можно выбирать произвольно. Дуги активных двухполюсников ориентируются по направлению источника тока и противоположно направлению источника напряжения (направление дуги указывает на положительное направление тока и противоположно положительному направлению напряжения). (44)
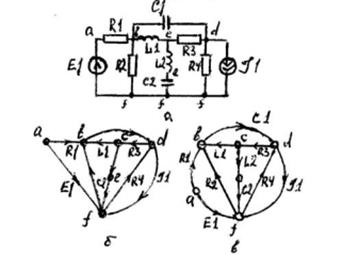
Рисунок 5 - Электрическая схема (а) и ее изоморфные графы (б и в).

