 2014-02-02
2014-02-02 2170
2170Лекция 10. Нелинейные системы автоматического управления
Известно, что на практике системы, точно описываемые линейными уравнениями, встречаются сравнительно редко, т.к. статические характеристики любого практически используемого элемента линейны лишь на ограниченных участках.
Причины нелинейностей характеристик могут быть различны. Это могут быть такие явления, как насыщение, наличие сухого трения, зазоров в кинематических элементах, гистерезисных петель в характеристиках электромагнитных элементов и т.п.
Кроме того, сами характеристики могут изменяться во время работы системы в зависимости от ряда условий. Когда это возможно, при расчетах системы прибегают к линеаризации уравнений, описывающих поведение того или иного элемента системы, а, следовательно, и уравнений всей системы в целом.
Если при этом существенные свойства происходящих процессов отражаются таким приближенным линеаризованным уравнением достаточно полно, то такая акция является допустимой и целесообразной. Целесообразность этого выражается прежде всего в том, что линейные и линеаризованные системы исследуются достаточно полно и сравнительно просто в общем виде.
Однако в ряде случаев при построении систем управления приходится иметь дело с такими системами, поведение которых описать линейными и линеаризованными уравнениями не представляется возможным. Такое положение создается тогда, когда в структуру системы включен один или несколько элементов, имеющих существенно нелинейные характеристики. В таком случае необходимо систему рассматривать как нелинейную.
В общем случае в состав системы могут входить элементы, описываемые нелинейными дифференциальными или разностными уравнениями. Однако мы ограничимся рассмотрением систем, имеющих в своем составе элемент с существенно нелинейной статической характеристикой.
Нелинейным системам присущи принципиально новые явления в динамике, которые отсутствуют у линейных систем. Так, например, к нелинейным системам неприменим принцип суперпозиции. Понятие устойчивости для нелинейных систем также расширяется и усложняется. Например, одна и та же нелинейная система может быть в зависимости от вида и параметров входных воздействий и устойчивой и неустойчивой. Для нелинейных систем существуют понятия устойчивости в малом, в большом и в целом. В нелинейных системах может возникать явление, называемое автоколебаниями, состоящее в том, что в системе при определенных условиях возникают незатухающие и не нарастающие постоянные колебания, имеющие постоянную амплитуду и частоту. В нелинейных системах имеют место и другие особенности как в установившихся, так и в переходных процессах.
Множество нелинейных систем настолько широко и многообразно, что практически нельзя говорить о едином «классе» нелинейных систем, противостоящих классу линейных систем. Мы ограничимся рассмотрением систем, которые можно представить в виде соединения двух частей: линейной части (ЛЧ), описываемой обыкновенными линейными дифференциальными уравнениями с постоянными коэффициентами, и нелинейного элемента (НЭ) (см. рис 10.1). НЭ является безинерционным, и его входная и выходная величины связаны между собой нелинейным алгебраическим уравнением. Таким образом, нелинейность рассматриваемых систем обусловлена нелинейностью статической характеристики одного из ее элементов.
Если система содержит несколько нелинейных элементов, то ее в некоторых случаях можно свести к рассматриваемому классу, заменив нелинейные элементы одним с результирующей статической характеристикой. Например, при последовательном, па-
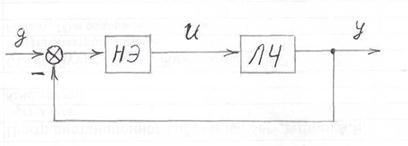 |
Рис.10.1. Блок-схема нелинейной системы
раллельном и встречно-параллельном соединении нелинейных элементов такое сведение выполнимо. Если же нелинейный элемент находится в другом месте структурной схемы, то структурную схему можно привести к виду, изображенного на рис.10.1, используя правила преобразования структурных схем.
Структурные преобразования нелинейных систем отличаются от преобразований линейных систем. Это объясняется, во-первых, тем, что для нелинейных систем неприемлем принцип суперпозиции, и, во-вторых, тем, что амплитуда сигнала на входе нелинейного элемента должна оставаться неизменной, независимо от выполняемых преобразований, поэтому в нелинейных системах нельзя перемещать звенья за нелинейный элемент. Преобразование линейных звеньев, расположенных до НЭ или за ним, можно выполнять по обычным правилам.
НЭ по виду их характеристик принято делить на однозначные и неоднозначные. У НЭ с однозначной характеристикой статическая характеристика представляет однозначную зависимость между входной и выходной величинами, как при увеличении, так и при уменьшении входной величины. У НЭ с неоднозначной характеристикой выходная величина при увеличении входной величины изменяется по одной зависимости, а при уменьшении – по другой.

