 2015-04-30
2015-04-30 2265
2265Проектирование модуля начинается с выбора его общей компоновочно-кинематической схемы на основе известных схем, собранных в банке исходной для проектирования информации. В таком банке компоновочно-кинематические схемы для систематизации группируют по следующим признакам:
назначению — выдвижения или подъема руки, сдвига схвата, горизонтального перемещения всего робота или нескольких его модулей;
виду направляющих — две, три, четыре цилиндрические направляющие; призматические направляющие с тремя или четырьмя гранями, смешанные направляющие;
виду опор направляющих — скольжения, с телами качения в виде роликов на осях или в сепараторах, с шариковыми опорами качения и т. п.;
подвижности каретки — по неподвижным направляющим движется каретка, относительно неподвижной каретки движутся направляющие, комбинированные схемы;
виду и расположению привода — силовые цилиндры совмещены с направляющими, находятся внутри или рядом с направляющими, вращательный привод с зубчатой или цепной передачей и т. п.;
размещению упоров, тормозных устройств и датчиков положения — на основной или вспомогательной направляющей, дополнительной штанге, корпусе и т. п.
Различные сочетания этих элементов компоновки образуют множество возможных компоновочно-кинематических схем модулей. Некоторые из этих схем, нашедшие практическое применение, приведены в табл. 2.1.
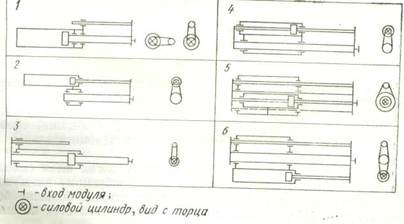
Модули с основной и вспомогательной цилиндрическими направляющими (табл. 2.1, схемы 1 — 6). Основная направляющая обеспечивает прямолинейность движения и воспринимает боковую нагрузку, перпендикулярную оси движения. Вспомогательная направляющая, более тонкая и податливая по сравнению с основной, устанавливается для угловой фиксации входа модуля относительно оси движения.
Роль основной (схемы 1 и 3) или вспомогательной (схемы 2 и 4) направляющих может играть шток силового цилиндра. Схема 1 — самый простой вариант реализации модуля поступательного перемещения, так как представляет собой обычный силовой цилиндр, шток которого соединен с легкой вспомогательной направляющей.
Схемы 2 и 4 применяют в тех случаях, когда шток силового цилиндра, размеры которого выбраны по требуемому движущему усилию, не в состоянии воспринимать достаточно большие боковые нагрузки. Общим недостатком схем 1—4 является повышенный износ уплотняемой поверхности штока под действием боковых нагрузок и момента на входе модуля.
Таблица 2.1
Модули с основной и вспомогательной цилиндрическими направляющими
Модули с.несколькими одинаковыми цилиндрическими направляющими
Модули с основной цилиндрической направляющей, подвижной относительно вспомогательной
Модули с основной цилиндрической и вспомогательной призматической направляющими
®- порошковая электромагнитная муфта
Модули с шарнирно- рычажными механизмами поступательных перемещений
Модули с призматическими направляющими
Для предотвращения такого износа силовой цилиндр устанавливается внутри (схема 5) или рядом (схема 6) с основной направляющей. Схема 5 более компактна в поперечном направлении и обеспечивает центральное относительно основной направляющей приложение усилия привода. Однако для закрепления силового цилиндра на неподвижном основании в направляющей приходится делать прорезь, которая снижает ее жесткость. Технологичнее и компактнее в продольном направлении схема 6. Однако в ней опоры основной направляющей дополнительно нагружаются моментом от внецентренного приложения усилия привода.
Упоры, регулирующие ход степени подвижности, перемещаются и закрепляются на вспомогательной (схемы 1, 6) или основной (схемы 4 и 5) направляющих.
При увеличении действующего на вход модуля момента относительно оси движения основная направляющая оказывается недогруженной по сравнению со вспомогательной. Поэтому схемы первой группы применяют только при незначительных моментах, действующих на вход.
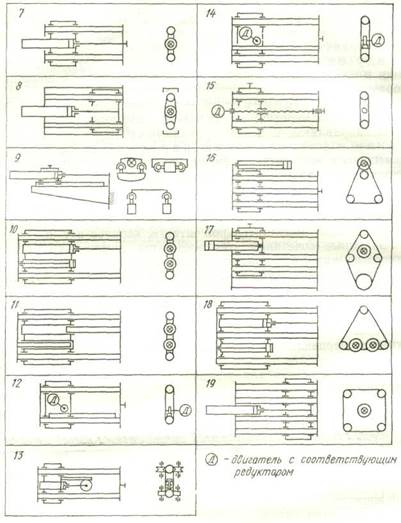
Модули с несколькими одинаковыми цилиндрическими направляющими (табл. 2.1, схемы 7— 19). В этих модулях цилиндрические направляющие воспринимают в равной степени все составляющие нагрузки.
Наиболее часто в модулях выдвижения руки с силовым цилиндром применяют схему 7. Уменьшить толщину (один из поперечных габаритных размеров) модуля позволяет переход от одного силового цилиндра к двум меньшего диаметра, направленным в противоположные стороны (схемы 10, 18).
В легких роботах с гидроприводом требуются силовые цилиндры с диаметром 5 — 10 мм при ходе 200 — 500 мм.
Достаточно технологичная конструкция с такими параметрами получается за счет перехода от силовых цилиндров к плунжерам (схема 11).
Модули вращательных степеней подвижности
Для уменьшения длины силового цилиндра на его штоке устанавливается зубчатое колесо, входящее в зацепление с зубьями, нарезанными на направляющей, и дополнительной неподвижной рейкой (схема 13). Зубчатое колесо и рейка используются также для преобразования движения электрического или гидравлического вращательного привода в поступательное (схемы 12 и 14). При этом зубчатая рейка либо прикрепляется непосредственно к направляющей или выполняется задело с ней (схема 12), либо находится между направляющими (схема 14). Для преобразования движения используется также передача винт — гайка (схема 15). Повышения жесткости модулей можно достигнуть либо увеличив число направляющих до трех (схемы 16 — 18) или четырех (схема 19), либо прикрепив их по концам к дополнительной несущей конструкции (схемы 8, 17). Еще большую жесткость дает прикрепление направляющей к жесткому корпусу по всей длине (схема 9).
Модули с цилиндрическими направляющими обычно выполняют на опорах скольжения. Реже устанавливают опоры в виде конических роликов на осях (схема 13) или на шариковых опорах (схема 9).
Конструкции с компоновочными схемами второй группы технологичны. В них полностью используются несущие возможности обеих направляющих. Поэтому они хорошо воспринимают как боковые нагрузки, так и моменты.
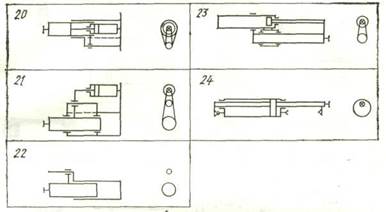
Модули с основной цилиндрической направляющей, подвижной относительно вспомогательной (схемы 20 — 24). Вспомогательная направляющая с двух концов (схемы 20, 21) или с одного (схемы 22 и 23) закреплена на неподвижном корпусе. Силовой цилиндр модулей подъема располагается в нижней части (схема 20) или рядом (схема 21) с основной направляющей. При такой компоновке в направляющей остается место для размещения модуля вращения. В схеме 22 основная направляющая совмещена со штоком — плунжером силового цилиндра. Схемы 20, 21 и 22 по сравнению с другими схемами более громоздки в продольном направлении.
В схеме 24 угловая фиксация входа обеспечивается эксцентричным расположением штока относительно стакана силового цилиндра. Здесь внутренняя поверхность стакана играет роль вспомогательной неподвижной направляющей. Эта схема содержит минимальное количество конструктивных элементов — только силовой цилиндр. Однако из-за того, что расстояние между осями основной и вспомогательной направляющих не может быть большим, точность угловой фиксации и способность воспринимать моменты недостаточны. Поэтому на упорах приходится вводить конические фиксаторы, входящие в конце хода в соответствующие гнезда крышек силового цилиндра. Кроме того, сложно обеспечить необходимую для плавного движения точность взаимного расположения штока, поршня, силового цилиндра и его крышек. Благодаря легкости и простоте схема 24 используется в модулях выдвижения руки легких роботов. Но широкого распространения они не получили из-за нетехнологичности и слабой угловой фиксации. В схеме 23 роль вспомогательной неподвижной направляющей играет наружная поверхность силового цилиндра. По сравнению со схемой 24 здесь несколько больше конструктивных элементов, но в целом она значительно технологичнее, так как ролики опоры вспомогательной направляющей обеспечивают его работоспособность даже при значительных погрешностях взаимного расположения направляющих.
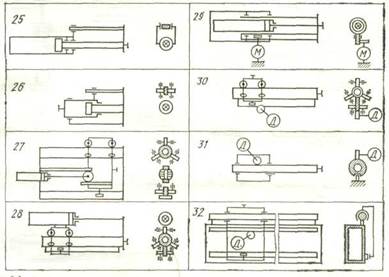
Модули с основной цилиндрической и вспомогательной призматической направляющими (табл. 2.1, схемы 25 — 32). В модулях этой группы к основной цилиндрической направляющей прикреплена вспомогательная призматическая, обеспечивающая угловую фиксацию входа.
Вспомогательная направляющая крепится к основной с помощью связующих корпусов у входа (схема 25), выхода (схема 26) модуля, с обеих сторон (схема 27), а также непосредственно к основной по всей ее длине (схемы 28—30).
В модулях горизонтального перемещения основная и вспомогательная направляющие устанавливаются на общую несущую конструкцию — портал (схема 32).
Основная направляющая иногда совмещается со штоком (схема 25) илисо штоком и наружной поверхностью (схема 26) силового цилиндра. Однако чаще силовой цилиндр выполняют отдельным агрегатом и устанавливают рядом (схема 28) или в центре (схема 29) основной цилиндрической направляющей.
Вспомогательная направляющая может быть совмещена с зубчатой рейкой, взаимодействующей с зубчатым колесом вращательного гидравлического, электрического привода (схема 30) или тормозного устройства (схема 29). При невысокой точности угловой фиксации роль вспомогательной направляющей может играть также шпоночный паз в основной цилиндрической направляющей (схема 31).
В большинстве модулей этой группы основная направляющая имеет две опоры с тремя роликами на осях, а вспомогательная — одну опору с двумя роликами (схемы 27 — 30). Такие схемы технологичны, так как не предъявляют повышенных требований к точности изготовления и сборки узла. В схеме 32 каретка может двигаться по цилиндрической направляющей на шариковых опорах.
Компоновочные схемы 28—31 отличаются малыми поперечными габаритными размерами и относительно невысокой точностью угловой фиксации.
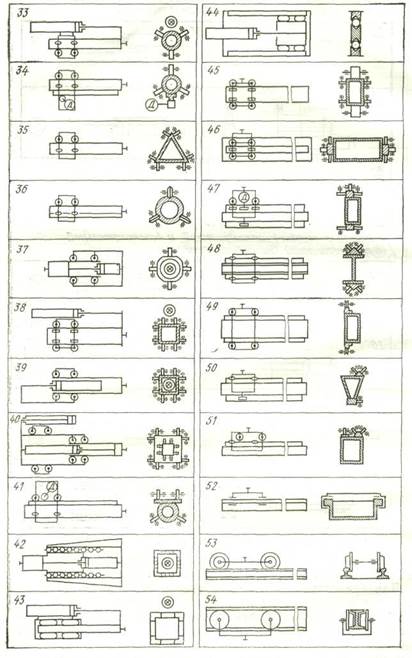
Модули с призматическими направляющими (табл. 2.1, схемы 33 — 54). В этих модулях все виды нагрузок воспринимаются обычно одной призматической направляющей. Наиболее технологичны призматические направляющие, полученные огранкой толстостенных труб (схемы 33, 34, 37). Эти направляющие имеют по две опоры с тремя (схемы 33, 34) или четырьмя (схема 37) роликами на осях в каждой. Малая ширина таких роликов и граней направляющих не обеспечивает достаточной угловой фиксации. В схеме 33 моменты могут частично восприниматься штоком силового цилиндра.
Высокую жесткость и хорошую угловую фиксацию обеспечивают направляющие с тремя (схема 35) или четырьмя (схемы 38 — 40, 42, 43, 45) широкими гранями. Они могут быть изготовлены из проката специального профиля (схемы 38 — 40), из сварных конструкций или отливок (схемы 35, 42, 45).
Одним из препятствий при реализации таких направляющих является низкая износостойкость материала проката или отливок. Небольшие направляющие могут быть сплошными (схема 43).
Призматические направляющие с широкими гранями обычно устанавливают на двух опорах с роликами на осях. Для улучшения угловой фиксации, как правило, на каждую грань опираются два или четыре ролика, максимально сдвинутых к ребрам направляющей. В итоге каждая опора трехгранной направляющей содержит по шесть роликов (схема 35), а в четырехгранных — по восемь (схемы 38 — 40, 42). Исключение составляет схема 45, в которой каждая опора верхней и нижней граней содержит по одному более мощному по сравнению с остальными ролику.
Схема 36 является обращенной по отношению к схеме 35. Здесь вместо ребер на сплошной цилиндрической направляющей выполнены пазы, а каждый конический ролик заменяют на два ролика в предыдущей схеме.
Схема 41 является комбинацией направляющих с узкими и широкими гранями. Здесь к цилиндрической направляющей с тремя узкими гранями прикреплена широкая пластина, служащая одновременно зубчатой рейкой привода. Направляющая устанавливается на двух опорах с четырьмя роликами на осях. Такая конструкция сочетает технологичность и хорошую угловую фиксацию.
Направляющая модуля в схеме 42 по всей своей длине опирается на два ряда роликов в сепараторах, а в 43 каждая грань направляющих установлена на двух широких роликовых опорах с циркуляцией тел качения.
Из-за большого количества опорных элементов в рассмотренных схемах необходимо либо повышать точность формы направляющих и взаимного расположения опор, либо часть опор выполнять подпружиненными. Причем чем выше жесткость модуля и, следовательно, больше размеры поперечного сечения направляющих, тем сложнее обеспечить требуемую точность изготовления и сборки узла.
Существенно повысить технологичность модуля, особенно высокой жесткости и с большими ходами, позволяют накладные направляющие. Благодаря небольшим размерам таких направляющих сравнительно легко добиться требуемой износостойкости и точности их обработки. Высокая жесткость обеспечивается прикреплением этих направляющих по всей длине к некоторой несущей конструкции в виде П-образного сварного корпуса (схема 44) или балки портала (схемы 45—51, 54).
При сравнительно небольших размерах модуля каретка может перемещаться по двум накладным направляющим на восьми шариковых опорах с циркуляцией тел качения (схема 44). В остальных случаях, как правило, используют опоры в виде роликов на осях.
В схеме 46 каретка движется по двум прямоугольным накладным направляющим на четырех опорах с тремя роликами в каждой. Основной недостаток данной конструкции — чувствительность к непараллельности направляющих. Каретка модуля в схеме 47 имеет только три опоры, две из которых содержат по три ролика на осях, а третья, нижняя, — только два. Такая конструкция обеспечивает свободное перемещение даже при значительных погрешностях взаимного расположения направляющих.
В портальных роботах часто используют накладные направляющие треугольного сечения (схемы 48 и 49). Каретка в этих модулях устанавливается на трех или четырех опорах, каждая из которых содержит либо по два цилиндрических ролика на осях (схема 48), либо по одному коническому ролику на оси (схема 49). Конструкции с четырьмя опорами имеют более высокую жесткость по сравнению с модулями на трех опорах, но они более чувствительны к непараллельности направляющих. При необходимости эти погрешности взаимного расположения направляющих могут быть компенсированы податливой установкой части опор.
Малую чувствительность к погрешностям взаимного расположения имеют схемы 50 и 51 с одной прямоугольной и второй треугольной (в сечении) направляющими. Они могут выполняться как начетырех, так и на трех опорах. В отличие от предыдущих схем здесь перекос направляющих приводит только к неравномерности нагрузки на опорах.
В роботах с прямоугольной системой координат применяют направляющие станочного типа, выполненные зацело с литым корпусом, установленным на фундаменте (схема 52).
Перемещение робота с невысокой точностью может осуществляться на четырех колесах с ребордами непосредственно по стандартным рельсам (схема 53) или двутаврам (схема 54).
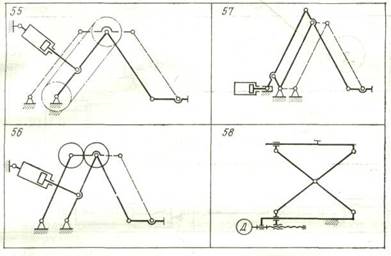
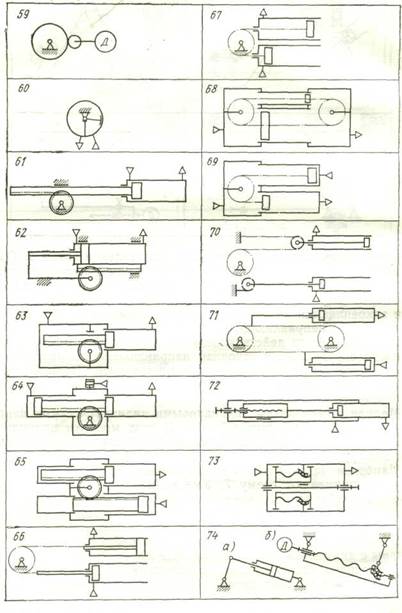
Модули с шарнирно-рычажными механизмами поступательных перемещений (табл. 2.1, схемы 55 — 58). Главная особенность компоновочных схем этой группы — особо малые продольные габаритные размеры. Поступательное перемещение входов модулей достигается соответствующей координацией с помощью цепной (схема 55), зубчатой (схема 56) или шарнирно-рычажной (схема 57) передач движения основных несущих звеньев. Эти передачи задают одинаковый угол их поворота относительно неподвижного основания. Близка к этим схемам также компоновка 55, построенная на базе кулисно-рычажного механизма параллельных линеек. Модули вращательных степеней подвижности (табл. 2.1, схемы 59—74). Компоновочно-кинематические схемы модулей вращательных степеней подвижности прежде всего различаются видом встроенных в них передач.
Привод модулей от обычных вращательных двигателей обычно осуществляется через ряд зубчатых передач (схема 59). Специальные двигатели, например высокомоментные вращательные, неполноповоротные гидравлические или пневматические, могут быть встроены непосредственно в шарнир модуля (схема 60), что позволяет упростить и значительно облегчить конструкцию. Однако надежное уплотнение таких двигателей обеспечить достаточно сложно. Поэтому привод модулей вращательных степеней подвижности большинства пневматических и гидравлических роботов осуществляется от обычных силовых цилиндров со встроенными передачами, преобразующими поступательное движение во вращательное.
Простейший вариант модуля со встроенной передачей — зубчатое колесо-рейка (схема 61). Один из его главных компоновочных параметров — продольный габаритный размер — определяется ходом силового цилиндра S=rφ (r — радиус делительной окружности зубчатого колеса; φ — требуемый угол поворота входа модуля, рад).
Продольный габаритный размер компоновки 61 более 35. Сделать модуль компактнее за счет уменьшения радиуса зубчатого колеса не удается из-за интенсивного падения жесткости узла (жесткость пропорциональна четвертой — шестой степени радиуса). Уменьшение продольных габаритных размеров примерно до 2S при сохранении достаточной жесткости достигается перенесением рейки на внешнюю поверхность силового цилиндра (схема 62), переходом к одностороннему силовому цилиндру с подачей питания в полость зубчатого колеса (схема 63) или двум односторонним силовым цилиндрам (схема 64 и 65). Последняя схема отличается от предыдущих отсутствием зазоров в зубчатом зацеплении и поэтому применяется преимущественно в гидравлических роботах с позиционной системой управления.
Следующая группа модулей содержит передачи с гибким тянущим органом — цепью, тросом или лентой. При тех же диаметрах звездочки или барабана даже простейшая схема 66 имеет сравнительно небольшой продольный габаритный размер, немного превышающий 2S. Еще меньше габаритные размеры (схема 67) с уплотнением непосредственного гибкого тянущего органа, который в данном случае выполняется в виде обрезиненного троса. Более технологично он может быть уплотнен дополнительным поршнем (схема 68). Проста и компактна также схема 69 с двумя односторонними силовыми цилиндрами и подачей питания в полость звездочки.
При тех же размере и угле поворота звездочки с помощью цепного мультипликатора (схема 70) можно уменьшить ход и, следовательно, улучшить технологичность силового цилиндра, а схема 71 позволяет уменьшить диаметры силовых цилиндров при тех же моментах сопротивления на входе модуля. В целом нагрузочная способность цепных передач ниже, чем у зубчатых. Поэтому их применяют преимущественно только в тех случаях, когда из компоновочных соображений радиус зубчатого колеса или звездочки искусственно завышен.
Из-за низкого КПД передачи винт — гайка (схемы 72 и 73) сравнительно редко применяют в модулях вращательных степеней подвижности. Однако благодаря малым поперечным габаритным размерам такие модули удобно встраивать в направляющие поступательных степеней подвижности.
Шарнирно-рычажные передачи с силовыми цилиндрами (схема 74) или шарико-винтовой парой широко используют для поворота на небольшой угол (порядка 90°) звеньев преимущественно ангулярных манипуляторов. Количество различных компоновочно-кинематических схем модулей достаточно велико. С целью выбора наиболее подходящих из них для конкретной проектной ситуации рассмотренные схемы сгруппированы по назначению модулей и классу роботов
| Вид системы координат | Номер компон. | Схемы компоновок | Наиболее неблагоприятное сочетание переносных движений в цикле |
| Декартова | 
| Ход каретки по монорельсу вправо — опускание руки, ход каретки по монорельсу влево — подъем руки | |

| Подъем руки — ход руки вперед — перемещение колонны вправо — ход руки назад — перемещение колонны влево — опускание руки | ||
| Цилиндрическая | 
| Подъем руки — ход вперед — поворот колонны вправо — ход назад — поворот колонны влево — опускание руки | |

| |||

| |||

| Ход вперед — опускание руки — поворот влево — подъем руки — поворот вправо — ход назад | ||

| Опускание руки — поворот вправо — ход каретки по монорельсу вправо — поворот влево — подъем руки — ход каретки по монорельсу влево | ||
| Сферическая | 
| Поворот вверх — ход вперед — поворот вправо — ход назад — поворот влево — поворот вниз | |
| Угловая | 
| Поворот локтя вверх — поворот плеча вверх — ход каретки вправо — поворот плеча вниз — поворот локтя вниз — ход каретки влево | |

| Поворот плеча влево — «выпрямление локтя» — поворот руки вправо — поворот плеча вправо — «сгибание jiokth» — поворот руки влево |

