2015-04-30
2015-04-30 621
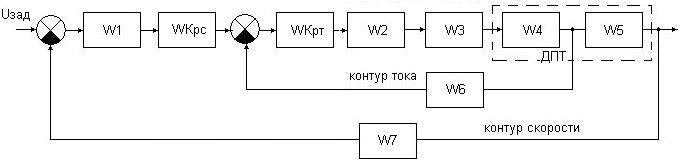
621Динамическая модель приводной системы руки манипулятора представлена на рисунке 8.
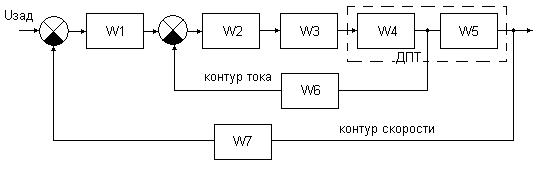
Рисунок 8 - Динамическая модель приводной системы
Согласно положениям теории автоматизированного управления, каждое звено имеет свою передаточную функцию – отношение выходного значения системы к входному в операторной форме при нулевых начальных значениях. Исходя из этого, рассмотрим динамическую модель системы подробнее и проанализируем её на устойчивость.
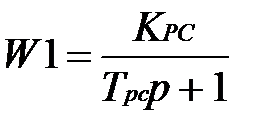 ;
; 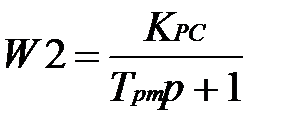 ;
;  ;
;  ;
;  ;
;  ;
;  .
.
Значения коэффициентов усиления для каждого звена и постоянных времени, рассчитанные ранее:
КРС = 21,88; ТРС = 
КРТ = 21,88; ТРТ = 9,9;
КТП = 31; ТТП = 0,0035;
КДТ = 1.43; ТДТ = 0,0052;
КТГ = 0,03; ТМ = 4,95;
КД= 1,102; ТЯ = 0,0216.



Для определения устойчивости относительно задающего воздействия по критерию Найквиста, разрываем цепь обратной связи по двум контурам (скорости и тока) и определяем передаточную функцию системы в разомкнутом состоянии (рисунок 9).

Рисунок 9 - Разомкнутая динамическая приводная система
 ; ;
; ;  ; ; ;
; ; ;
где 
Построение графиков ЛАЧХ и ЛФЧХ разомкнутой системы.
Из графиков (рисунок 10) видно, что по критерию Найквиста система не устойчива, так как ЛФЧХ пересекает ординату -180 раньше, чем ЛАЧХ ось частот. Необходимо скорректировать систему.
Передаточная функция корректирующего звена по контуру тока выглядит следующим образом:

| Рисунок 10 - Графики ЛАЧХ и ЛФЧХ разомкнутой системы |







Частота среза среднечастотного диапазона желаемой характеристики:
,ω - ср., 2.5∙π -, t - р..,,рад - с.;
где,t - р.=0.02 с время переходного процесса;
Получаем частотные характеристики корректирующего устройства (рисунок 11).
Тогда скорректированная система будет выглядеть следующим образом
| Рисунок 11 - Графики ЛАЧХ и ЛФЧХ корректирующего устройства по току |
| Рисунок 12 - Графики ЛАЧХ и ЛФЧХ скорректированной системы по току |
| Рисунок 13 - Графики ЛАЧХ и ЛФЧХ разомкнутой системы по контуру скорости |
Из рисунка 13 видно, что система является устойчивой по критерию Найквиста. Введем ПИД-регулятор в контур скорости для поддержания частоты вращения двигателя на постоянном уровне (рисунок 14).
Передаточная функция ПИД-регулятора:
,W - крс., р.=k+,Т - Д.р+,1 -, Т - и.р.;
где к – 1190;

 = 0.091;
= 0.091;
| Рисунок 14 - ЛАЧХ и ЛФЧХ корректирующего звена по контуру скорости |
| Рисунок 15 - Графики ЛАЧХ и ЛФЧХ скорректированной системы по скорости |

| Рисунок 16 - Переходной процесс |
Время регулирования 0,1 с;
Перерегулирование 8.98 %.
Полученная система имеет вид: