 2015-05-10
2015-05-10 522
522Цель работы
Аналитическое определение параметров обобщенного цифрового регулятора по известному математическому описанию непрерывного регулятора.
Определение динамических характеристик замкнутой системы при различных параметрах цифрового регулятора.
Исходные данные
Таблица 1. Исходные данные
| Вид передаточной функции регулятора внутреннего контура | 
| 
| 
| 
| 
|
| 
| 
| 
|
|
|
Выполнение работы
Определение параметров цифрового регулятора осуществляется путем пересчета параметров синтезированного непрерывного регулятора.
Идея переоборудования заключается в следующем: замкнутая система с непрерывным объектом управления  и синтезированным непрерывным регулятором с передаточной функцией
и синтезированным непрерывным регулятором с передаточной функцией  переоборудуется к системе с цифровым регулятором
переоборудуется к системе с цифровым регулятором  и фиксатором вычисленных значений с передаточной функцией
и фиксатором вычисленных значений с передаточной функцией
Переоборудование базируется на представлении интеграла суммой. Эта сумма может быть вычислена различными способами.
Рассмотрим способы численного интегрирования, которые использованы в среде Matlab-Simulink. Но, для начала, необходимо непрерывный регулятор внутреннего контура, полученный при выполнений первой лабораторной работы, заменить ПИД регулятором:


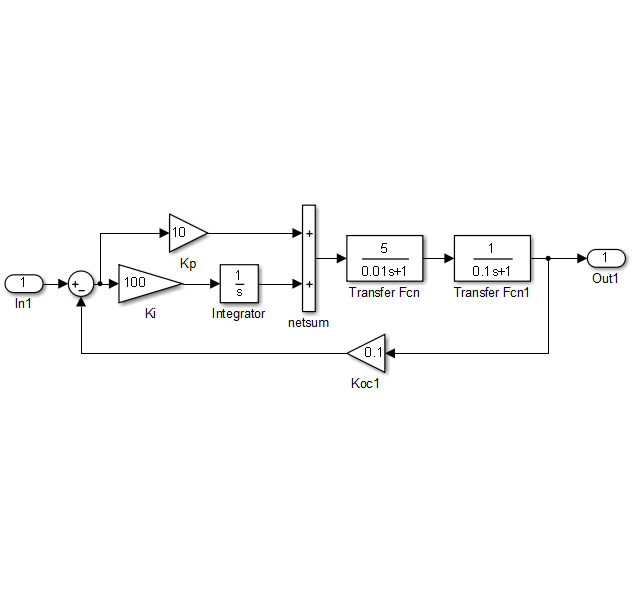
| Рисунок 1. ПИД регулятор во внутреннем контуре |








