2015-05-10
2015-05-10 463
463В этом случае аналогом оператора интегрирования является
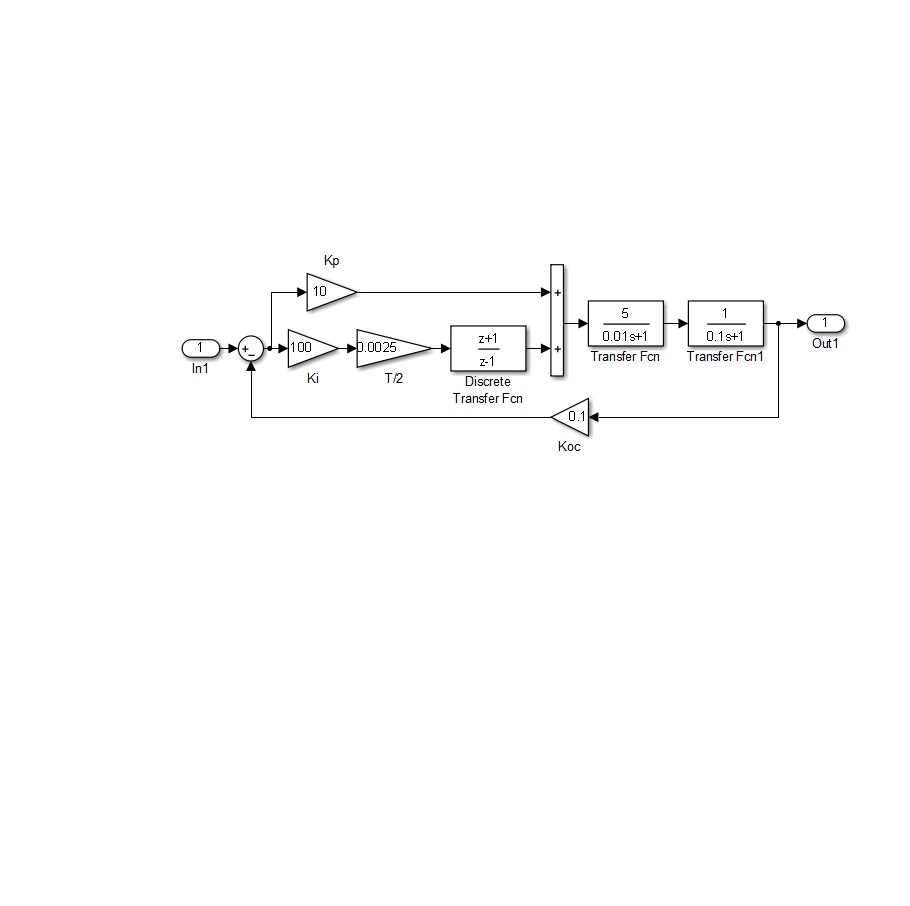
| Рисунок 6. Цифровой регулятор, полученный методом трапеции |
т.е. получим следующую систему:
| Рисунок 7. Реакция на единичный скачок непрерывной системы и цифровой системы, полученной методом трапеции |
Сравним графики реакций на единичный скачок непрерывной и полученной систем.
Исходя из графиков заметим, что полученная система по-прежнему хуже непрерывной по всем показателям, а каких-либо улучшений, по сравнению с предыдущей, получить не удалось.