 2015-05-20
2015-05-20 2328
2328Типовые звенья – это простые модели элементов сложных линейных систем и даже систем в целом.
Типовые звенья бывают:
· простейшие (пропорциональное звено, интегратор и дифференцирующее звено);
· звенья первого порядка (апериодическое или инерционное, инерционно-дифференцирующее, форсирующее и др.);
· звено второго порядка (колебательное и его частный случай – апериодическое второго порядка);
· звено третьего порядка (способное терять устойчивость, его можно назвать звеном Вышнеградского);
· звено запаздывания.
Основные характеристики линейных звеньев:
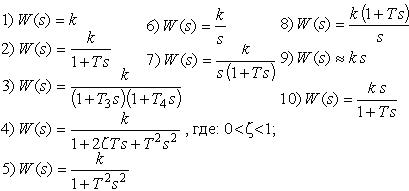
1. передаточная функция W (s) – отношение изображения выходного сигнала Y (s) к изображению входного сигнала X (s);
2. переходная характеристика h (t) – реакция звена на ступенчатое единичное воздействие 1(t);
3. импульсная ( или весовая) функция w (t) – реакция звена на дельта-функцию Дирака d(t);
4. комплексный коэффициент передачи (частотная передаточная функция) W (j w) – это отношение спектра выходного сигнала Y (j w) к спектру входного X (j w).
Типовые звенья линейных систем можно определять различными эквивалентными способами, в частности с помощью, так называемой передаточной функции, имеющей, как правило, дробно-рациональный вид, т.е. представляющей собой отношение двух полиномов:

где bi и aj – коэффициенты полиномов. Это т.н. параметры передаточной функции или звена.
Итак, по определению, передаточная функция – это отношение изображения Y(p) выходного сигнала y(t) звена к изображению X(p) его входного сигнала x(t)

т.е., передаточная функция позволяет по любому известному входному сигналу x(t) найти выходной y(t). Это значит, что с точки зрения ТАУ передаточная функция полностью характеризует систему управления или ее звено. Это же самое можно сказать и в отношении совокупности коэффициентов полиномов числителя и знаменателя передаточной функции.
Наличие нулевых корней в числителе или знаменателе передаточной функции типовых звеньев - это признак для разбиения последних на три группы:
- Позиционные звенья: 1, 2, 3, 4, 5, - не имеют нулевых корней, и, следовательно, в области низких частот (т.е. в установившемся режиме), имеют коэффициент передачи равный k.
- Интегрирующие звенья: 6, 7, 8, - имеют нулевой корень-полюс, и, следовательно, в области низких частот, имеют коэффициент передачи, стремящийся к бесконечности.
- Дифференцирующие звенья: 9, 10 - имеют нулевой корень-ноль, и, следовательно, в области низких частот, имеют коэффициент передачи, стремящийся к нулю.
Переходные и весовые характеристики основных типовых звеньев приведены в Таблице 1. Перечисленные линейные звенья содержат один вход и один выход. Существует еще одно линейное звено, которое может иметь несколько, больше одного, входов и один выход: сумматор. Сумматор - необходимое звено для построения модели достаточно сложной системы, состоящей из нескольких звеньев.
Типовых звеньев всего около полутора десятков, но из них, как из кубиков (или, если угодно, как любое сложное вещество из отдельных химических элементов), можно построить модель линейной системы управления любой сложности.
Таблица 1. Передаточные, переходные и весовые функции типовых динамических звеньев.
Таблица 1. Передаточные, переходные и весовые функции типовых д
| Передаточная функция W(s) | Переходная функция h(t) | Импульсная (весовая) функция ω(t) |
1. Безынерционное  | 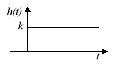  |   |
2. Апериодическое 1-го порядка  | 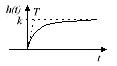  | 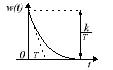  |
3. Апериодическое 2-го порядка  | 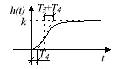  |   |
4. Колебательное  | 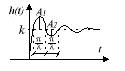  ; ;  ; ;   | 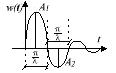  ; ;    |
5. Консервативное  | 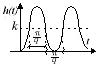  | 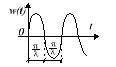  |
6. Идеальное интегрирующее  | 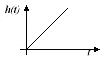  | 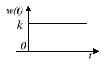  |
7. Интегрирующее с замедлением  | 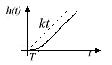 | 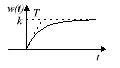 |
8. Изодромное  |   |  |
9. Идеальное дифференцирующее  |   |   |
10. Дифференцирующее с замедлением  | 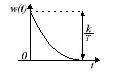  | 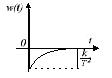  |

