 2015-05-10
2015-05-10 1477
1477Работа 4.3. Индуктивные измерительные преобразователи. Измерение перемещения
Цель работы
Ознакомление с устройством и применением индуктивного измерительного преобразователя на примере измерителя перемещения, изучение метрологических характеристик измерительных преобразователей и схем их включения.
2. Сведения, необходимые для выполнения ра б оты
Повторите вопросы обработки и представления результатов прямых и косвенных измерений и, используя литературу [4, 16-19], настоящее описание и приложение 1, ознакомьтесь со следующими вопросами:
· Основные характеристики измерительных преобразователей.
· Методы измерения индуктивности.
· Принцип действия, устройство и характеристики индуктивных преобразователей.
· Причины возникновения и способы исключения или учета погрешностей при измерении индуктивности.
· Схемы включения и измерительные цепи индуктивных преобразователей.
· Устройства и характеристики средств измерений, используемых при выполнении данной работы.
В технических и научных измерениях неэлектрических величин широко используются индуктивные преобразователи, относящиеся к группе параметрических датчиков. Они отличаются конструктивной простотой, надежностью и малой стоимостью. К тому же для своей работы они не требуют сколь-либо сложного вторичного оборудования.
Индуктивный преобразователь представляет собой дроссель, индуктивность которого изменяется под действием входной (измеряемой) величины. В измерительной технике используются конструкции преобразователя с переменным воздушным зазором и соленоидные (или плунжерные) преобразователи, которые и изучаются в данной работе.
Индуктивный преобразователь с переменным воздушным зазором схематически показан на рис. 4.3.1а. Он состоит из П-образного магнитопровода 1, на котором размещена катушка 2, и подвижного якоря 3. При перемещении якоря изменяется длина воздушного зазора b и, следовательно, магнитное сопротивление. Это вызывает изменение магнитного сопротивления и индуктивности преобразователя L. При некоторых допущениях индуктивность преобразователя можно рассчитать по формуле
(4.3.1)
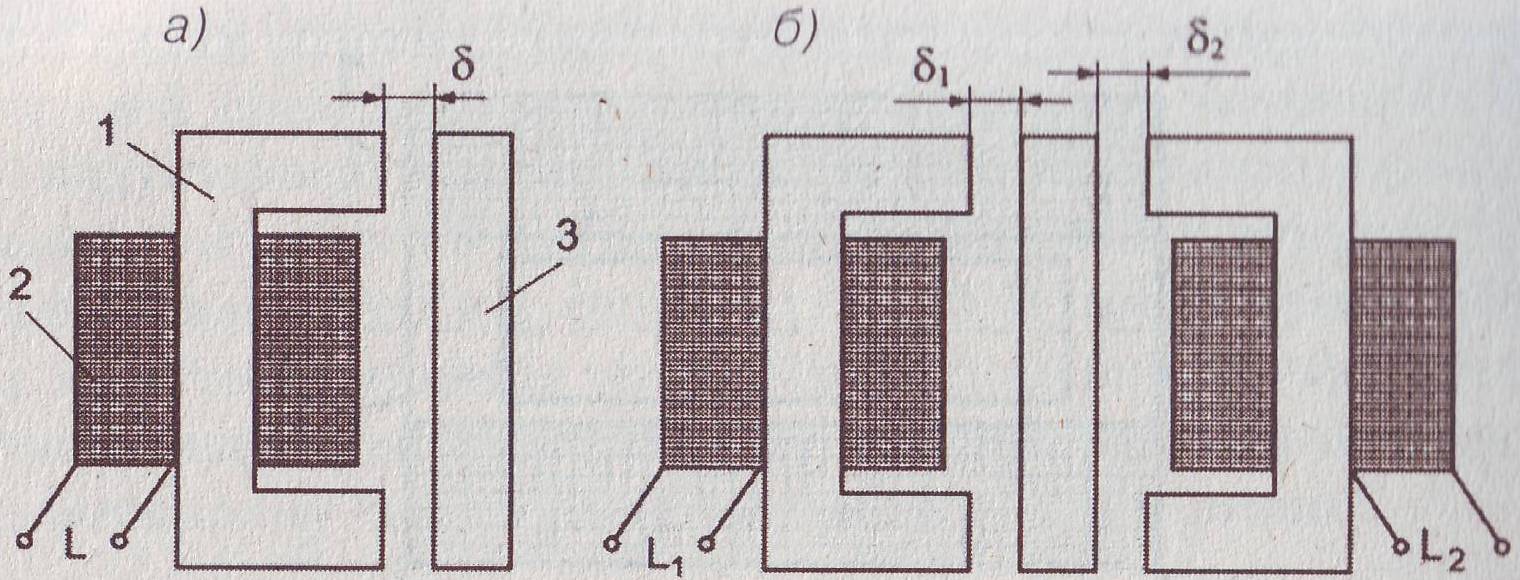
Рис. 4.3.1. Конструкция индуктивного преобразователя
с переменным воздушным зазором
(1- П-образный магнитопровод, 2- катушка, 3- якорь):
а) одинарный преобразователь; 6) дифференциальный преобразовател ь
где w- число витков катушки, µо = 4  107 Гн/м - магнитная постоянная, µ- магнитная постоянная стали, Q- площадь сечения магнитного потока в воздушном зазоре (считаем, что площадь сечения магнитопровода также равна), I) - средняя длина магнитной силовой линии по стали.
107 Гн/м - магнитная постоянная, µ- магнитная постоянная стали, Q- площадь сечения магнитного потока в воздушном зазоре (считаем, что площадь сечения магнитопровода также равна), I) - средняя длина магнитной силовой линии по стали.
Одинарные индуктивные преобразователи имеют ряд недостатков, в частности их функция преобразования нелинейная, они могут иметь большую аддитивную погрешность, вызванную температурным изменением активного сопротивления обмотки, и ряд других.
Этих недостатков лишены дифференциальные преобразователи, которые представляют собой два одинарных преобразователя, имеющих общий якорь. На рис. 4.3.1 б показан дифференциальный индуктивный преобразователь, состоящий из двух преобразователей, показанных на рис. 4.3.1а.
При перемещении якоря, например, влево, индуктивность L, возрастает, а другая индуктивность L2 уменьшается.
Другой разновидностью индуктивных преобразователей являются плунжерные преобразователи. На рис. 4.3.2а показан одинарный плунжерный преобразователь, который представляет собой катушку 1, из которой может выдвигаться ферримагнитный сердечник 2 (плунжер). При среднем положении плунжера индуктивность максимальна.
Дифференциальный преобразователь, состоящий из двух одинарных преобразователей плунжерного типа, схематически изображен на рис. 4.3.26. 3десь также при перемещении плунжера одна индуктивность уменьшается, а другая увеличивается.
При использовании индуктивных преобразователей в качестве выходной величины обычно используется не индуктивность как таковая, а реактивное сопротивление преобразователя Z, которое, если пренебречь активной составляющей, равно Z = jwL.
Важной характеристикой любого преобразователя является его чувствительность. По определению, абсолютной чувствительностью называется отношение изменения выходной величины к изменению входной:
 ,
,
(4.3.2)
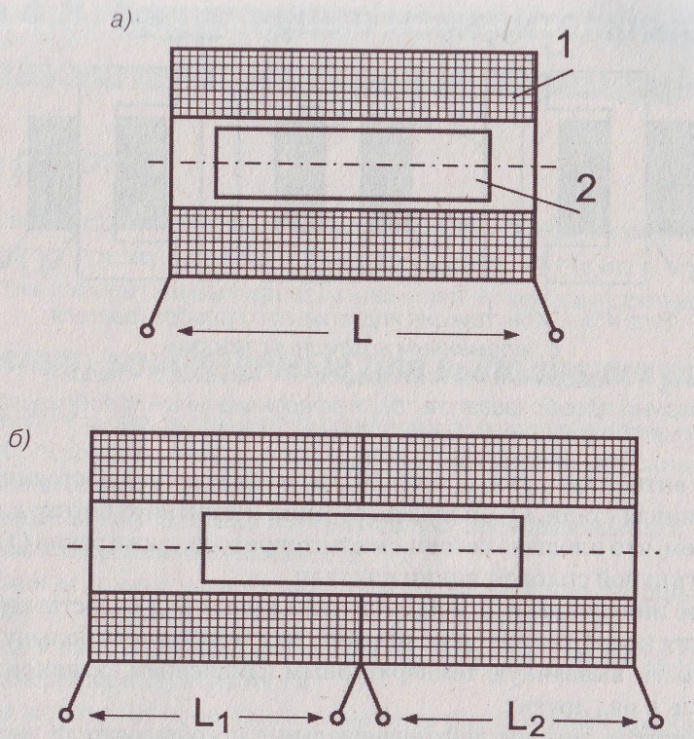
Рис. 4,3.2. Конструкция индуктивного плунжерного преобразователя
(1- катушка, 2 - плунжер): а) одинарный преобразователь;
6) дифференциальный преобразователь
где  - изменение сопротивления преобразователя, вызванное перемещением
- изменение сопротивления преобразователя, вызванное перемещением
плунжера (или якоря) на расстояние х.
В некоторых случаях, например для сравнения преобразователей одного типа, но имеющих разные сопротивления, удобно пользоваться понятием относительной чувствительности
В этой формуле  сопротивление преобразователя при х = 0.
сопротивление преобразователя при х = 0.
В данной работе, говоря о чувствительности, мы будем иметь в виду относи
тельную чувствительность.
Для измерения реактивного сопротивления дифференциальных индуктивных преобразователей используются мостовые схемы. Благодаря этому уменьшается аддитивная погрешность, улучшается линейность функции преобразования, в два раза увеличивается чувствительность и уменьшается сила притяжения якоря или плунжера. В мостовых схемах можно использовать различные схемы включения. Oднa из основных таких схем для индуктивных дифференциальных преобразователей приведена на рис. 4.3.3. При таком включении  - индуктивные сопротивления дифференциального преобразователя, сопротивления других плеч R и сопротивление нагрузки Rн могут быть как активными, так и реактивными (Z и Zн соответственно). В лабораторной работе используется мост, характеризующийся тем, что сопротивления катушек преобразователя имеют чисто индуктивное сопротивление, а другие сопротивления, входящие в измерительную схему, не содержат реактивных составляющих.
- индуктивные сопротивления дифференциального преобразователя, сопротивления других плеч R и сопротивление нагрузки Rн могут быть как активными, так и реактивными (Z и Zн соответственно). В лабораторной работе используется мост, характеризующийся тем, что сопротивления катушек преобразователя имеют чисто индуктивное сопротивление, а другие сопротивления, входящие в измерительную схему, не содержат реактивных составляющих.
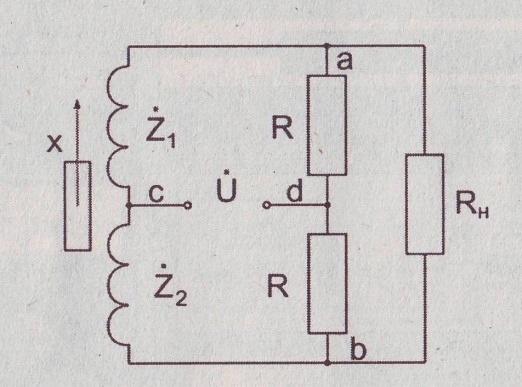
Рис. 4.3.3. Вариант схемы включения
Можно показать, что выходное напряжение, то есть напряжение на сопротивлении нагрузки RH, для приведенной схемы включения описывается следующим выражением:
где  - напряжение холостого хода (при Rн =
- напряжение холостого хода (при Rн =  ),
),  ,
,
R- сопротивление каждого из активных плеч моста, а U- напряжение питания моста.
Чувствительность мостовой схемы определяется выражением

Погрешности индуктивных преобразователей в основном обусловлены изменением активной составляющей их сопротивлений. Эта погрешность аддитивна и уменьшается в случае применения мостовых схем. Кроме того, при изменении температуры изменяется магнитная проницаемость стали, что приводит к дополнительному изменению аддитивной и мультипликативной погрешностей. Изменения напряжения питания и его частоты также служат причиной изменения чувствительности и появления мультипликативных погрешностей.

