 2015-05-10
2015-05-10 2704
2704Информативная способность индуктивного датчика в значительной мере определяется его погрешностью преобразования измеряемого параметра. Суммарная погрешность индуктивного датчика складывается из большого числа составляющих погрешностей.
Можно выделить следующие погрешности индуктивного датчика:
1) Погрешность от нелинейности характеристики. Мультипликативная составляющая общей погрешности. Из-за принципа индуктивного преобразования измеряемой величины, лежащего в основе работы индуктивных датчиков, является существенной и в большинстве случаев определяет диапазон измерения датчика. Обязательно подлежит оценке при разработке датчика.
2) Температурная погрешность. Случайная составляющая. Ввиду большого числа зависимых от температуры параметров составных частей датчика составляющая погрешность может достичь больших величин и является существенной. Подлежит оценке при разработке датчика.
3) Погрешность от влияния внешних электромагнитных полей. Случайная составляющая общей погрешности. Возникает из-за индуцирования ЭДС в обмотке датчика внешними полями и из-за изменения магнитных характеристик магнитопровода под действием внешних полей. В производственных помещениях с силовыми электроустановками обнаруживаются магнитные поля с индукцией Тл и частотой в основном 50 Гц.
Поскольку магнитопроводы индуктивных датчиков работают при индукциях 0,1 – 1 Тл, то доля от внешних полей составит 0,05–0,005% даже в случае отсутствия экранирования. Введение экрана и применение дифференциального датчика снижают эту долю примерно на два порядка. Таким образом, погрешность от влияния внешних полей должна приниматься в рассмотрение только при проектировании датчиков малой чувствительности и с невозможностью достаточной экранировки. В большинстве случаев эта составляющая погрешности не является существенной.
4) Погрешность от магнитоупругого эффекта. Возникает из-за нестабильности деформаций магнитопровода при сборке датчика (аддитивная составляющая) и из-за изменения деформаций в процессе эксплуатации датчика (случайная составляющая). Расчеты с учетом наличия зазоров в магнитопроводе показывают, что влияние нестабильности механических напряжений в магнитопроводе вызывает нестабильность выходного сигнала датчика порядка, и в большинстве случаев эта составляющая может специально не учитываться.
5) Погрешность от тензометрического эффекта обмотки. Случайная составляющая. При намотке катушки датчика в проводе создаются механические напряжения. Изменение этих механических напряжений в процессе эксплуатации датчика ведет к изменению сопротивления катушки постоянному току и, следовательно, к изменению выходного сигнала датчика. Обычно для правильно спроектированных датчиков, т. е. эту составляющую не следует специально учитывать.
6) Погрешность от соединительного кабеля. Возникает из-за нестабильности электрического сопротивления кабеля под действием температуры или деформаций и из-за наводок ЭДС в кабеле под действием внешних полей. Является случайной составляющей погрешности. При нестабильности собственного сопротивления кабеля погрешность выходного сигнала датчика. Длина соединительных кабелей составляет 1–3 м и редко больше. При выполнении кабеля из медного провода сечением сопротивление кабеля менее 0,9 Ом, нестабильность сопротивления. Поскольку полное сопротивление датчика обычно больше 100 Ом, погрешность выходного сигнала датчика может составить величину. Следовательно, для датчиков, имеющих малое сопротивление в рабочем режиме, погрешность следует оценивать. В остальных случаях она не является существенной.
7) Конструктивные погрешности. Возникают под действием следующих причин: влияние измерительного усилия на деформации деталей датчика (аддитивная), влияние перепада измерительного усилия на нестабильность деформаций (мультипликативная), влияние направляющих измерительного стержня на передачу измерительного импульса (мультипликативная), нестабильность передачи измерительного импульса вследствие зазоров и люфтов подвижных частей (случайная). Конструктивные погрешности в первую очередь определяются недостатками в конструкции механических элементов датчика и не являются специфическими для индуктивных датчиков. Оценка этих погрешностей производится по известным способам оценки погрешностей кинематических передач измерительных устройств.
8) Технологические погрешности. Возникают вследствие технологических отклонений взаимного положения деталей датчика (аддитивная), разброса параметров деталей и обмоток при изготовлении (аддитивная), влияния технологических зазоров и натягов в соединении деталей и в направляющих (случайная).
Технологические погрешности изготовления механических элементов конструкции датчика также не являются специфическими для индуктивного датчика, их оценка производится обычными для механических измерительных устройств способами. Погрешности изготовления магнитопровода и катушек датчика ведут к разбросу параметров датчиков и к затруднениям, возникающим при обеспечении взаимозаменяемости последних.
9) Погрешность от старения датчика. Эта составляющая погрешности вызывается, во-первых, износом подвижных элементов конструкции датчика и, во-вторых, изменением во времени электромагнитных характеристик магнитопровода датчика. Погрешность следует рассматривать как случайную. При оценке погрешности от износа во внимание принимается кинематический расчет механизма датчика в каждом конкретном случае. На стадии конструирования датчика в этом случае целесообразно задавать срок службы датчика в нормальных для него условиях эксплуатации, за время которого дополнительная погрешность от износа не превысит заданной величины.
Электромагнитные свойства материалов изменяются во времени.

В большинстве случаев выраженные процессы изменения электромагнитных характеристик заканчиваются в течение первых 200 часов после термообработки и размагничивания магнитопровода. В дальнейшем они остаются практически постоянными и не играют существенной роли в общей погрешности индуктивного датчика.
Проведенное выше рассмотрение составляющих погрешности индуктивного датчика дает возможность оценить их роль в формировании общей погрешности датчика. В большинстве случаев определяющими являются погрешность от нелинейности характеристики и температурная погрешность индуктивного преобразователя.
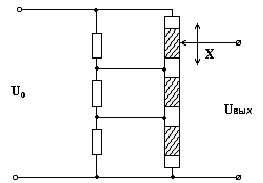
Потенциометрический датчик представляет собой переменный резистор, к которому приложено питающее напряжение, его входной величиной является линейное или угловое перемещение токосъемного контакта, а выходной величиной – напряжение, снимаемое с этого контакта, изменяющееся по величине при изменении его положения.
Потенциометрические датчики предназначены для преобразования линейных или угловых перемещений в электрический сигнал, а также для воспроизведения простейших функциональных зависимостей в автоматических и автоматических устройствах непрерывного типа.

Электрическая схема потенциометрического датчика
По способу выполнения сопротивления потенциометрические датчики делятся на
· ламельные с постоянными сопротивлениями;
· проволочные с непрерывной намоткой;
· с резистивным слоем.

Ламельные потенциометрические датчики использовались для проведения относительно грубых измерений в силу определенных конструктивных недостатков.
В таких датчиках постоянные резисторы, подобранные по номиналу специальным образом, припаиваются к ламелям.
Ламель представляет собой конструкцию с чередующимися проводящими и непроводящими элементами, по которой скользит токосъемный контакт. При движении токосъемника от одного проводящего элемента к другому суммарное сопротивление подключенных к нему резисторов меняется на величину соответствующую номиналу одного сопротивления. Изменение сопротивлений может происходить в широких пределах. Погрешность измерений определяется размерами контактных площадок.
Ламельный потенциометрический датчик
Проволочные потенциометрические датчики предназначены для более точных измерений. Как правило их конструкции представляют собой каркас из гетинакса, текстолита или керамики, на который в один слой, виток к витку намотана тонкая проволока, по зачищенной поверхности которой скользит токосъемник.
Диаметр проволоки определяет класс точности потенциометрического датчика (высокий-0,03-0,1 мм, низкий 0,1-0,4 мм). Материалы провода: манганин, фехраль, сплавы на основе благородных металлов. Токосъемник выполнен из более мягкого материала, чтобы исключить перетирание провода.
Преимущества потенциометрических датчиков:
· простота конструкции;
· малые габариты и вес;
· высокая степень линейности статических характеристик;
· стабильность характеристик;
· возможность работы на переменном и постоянном токе.
Недостатки потенциометрических датчиков:
· наличие скользящего контакта, который может стать причиной отказов из-за окисления контактной дорожки, перетирания витков или отгибание ползунка;
· погрешность в работе за счет нагрузки;
· сравнительно небольшой коэффициент преобразования;
· высокий порог чувствительности;
· наличие шумов;
· подверженность электроэррозии под действием импульсных разрядов.









