 2015-05-10
2015-05-10 3270
3270Существует много способов управления выходными параметрами ВЭУ [6]. Все они делятся на активные и пассивные. Достоинством пассивного способа управления ВЭУ является относительная простота в проектировании таких систем и их эксплуатации, активного – высокая точность выходных управляемых параметров.
В данной статье рассмотрено активное управление путем изменения угла атаки лопастей. Угловая скорость вращения ротора ВЭУ зависит от скорости ветра, угла поворота лопасти относительно набегающего потока и нагрузки на генераторе. Следовательно, при изменении ветра и нагрузки, варьируя углом атаки можно обеспечить постоянство угловой скорости.
На рис. 3 приведена функциональная схема системы управления, в которой использован данный принцип.
Эта система имеет следующие датчики: датчик угловой скорости электрогенератора, 4 датчика скорости ветра и датчики угла поворота лопастей и ее угловой скорости. На основании информации с них о величине текущих параметров формируется управляющий сигнал для исполнительного механизма, в роли которого выступает электропривод, который поворачивает лопасть на требуемый угол для обеспечения заданной угловой скорости вращения электрогенератора.
Рисунок 3 – Функциональная схема системы управления ВЭУ
На рис. 3 введены следующие обозначения:
ЗД – задатчик выходной угловой скорости электрогенератора:
ДУС – датчик угловой скорости;
ДУ – датчик угла;
ДСВ – датчик скорости ветра;
УМ – усилитель мощности;
Р – редуктор;
ДСГ – датчик угловой скорости генератора.
Четыре ДСВ расположены таким образом, что фиксируют значение скорости ветра в 4 разных точках и направлениях относительно оси вращения ротора. Блок обработки воздушной скорости формирует среднее значение скорости. Таким образом, решается проблема учета возникновения резких порывов ветра и вихревых потоков, которые возникают в результате вращения ротора ВЭУ.
В данную систему, в отличие от классической, которая имеет одну обратную связь по угловой скорости вращения электрогенератора, введены еще две дополнительные обратные связи по углу отклонения и угловой скорости лопасти, что значительно повышает быстродействие и точность системы.
Реализация системы управления ВЭУ в среде MATLAB/SIMULINK
Рассмотрим систему управления трехлопастной ВЭУ с горизонтальной осью вращения мощностью 600 кВт [2].
Согласно [2] радиус ометаемой поверхности ротора ВЭУ, которая обеспечит требуемую мощность при рабочей скорости ветра V 0 = 8 м/с, должен быть равным R = 24 м. Начальный угол атаки лопастей данной установки θ 0 = 10°.
На рис. 4 приведена зависимость коэффициента мощности от быстроходности для разных типов ветроустановок. Рабочую точку целесообразно выбирать на кривой за пиковым ее значением коэффициента мощности [6].
Для ВЭУ данного типа таковой является точка с быстроходностью 5 и СР0 = 0,45.
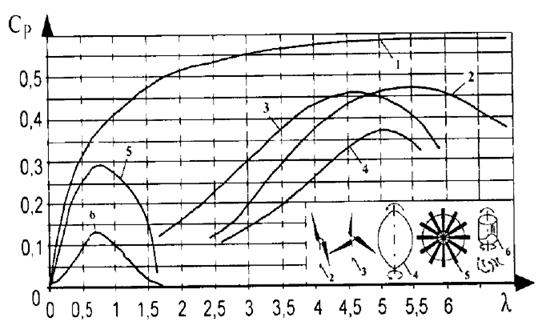
Рисунок 4 – Зависимость коэффициента мощности СР от быстроходности
Следовательно, ветроколесо должно вращаться с угловой скоростью w 0 = 2,7 рад/с.
Из всего вышеперечисленного определены коэффициенты ветроколеса R = 1,41, R 2 = 0,016, R 3 = 0,24 и постоянная времени
Т = 0,3 с.
На рис.5 приведена схема моделирования системы в среде
MATLAB/SIMULINK. Группа блоков Step1 – Step5 формирует диаграмму скачкообразного изменения ветрового возмущения. Блоки Sine Wave, Gain3 предназначены для формирования изменяющейся составляющей, а блок Constant1 – постоянной составляющей ветрового потока.
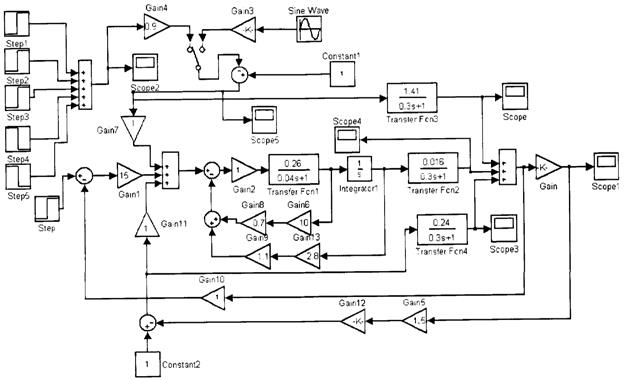
Рисунок 5 – Схема моделирования системы в среде MATLAB/SIMULINK
Блок Step формирует задающее воздействие в виде ступенчатой функции; Gain1 – усилитель выходного сигнала; блок Transfer Fnc1 – передаточная функция исполнительного механизма; Transfer Fnc2 – Transfer Fnc4 – передаточные функции объекта соответственно с входными переменными: скоростью ветра, угла атаки лопасти и изменения нагрузки. Блок Constant2 задает уровень исходной нагрузки.
Блок Gain соответствует уменьшению общего коэффициента передачи системы в результате действия нагрузки.
Блок Gain2 – коэффициент усиления мощности; Gain8 – коэффициент передачи датчика угловой скорости; Gain9 – коэффициент передачи датчика угла; Gain10 – датчика угловой скорости внешнего контура; Gain12 – датчика нагрузки.
Блоки Gain8 и Gain9 – коэффициенты обратных связей по угловой скорости вращения лопасти и ее углу отклонения соответственно.
Блоки Step, Step1 – Step5 предназначены для имитации скачкообразного изменения ветра.
Блок Switch предназначен для исследования качества системы регулирования при различных изменениях ветрового потока: синусоидального и ступенчатого.
Блоки регистрации сигналов позволяют получить реакции: угла лопасти ВЭУ (Scope), угловой скорости электрогенератора (Scope1), формирования ветрового порыва (Scope2), изменения нагрузки (Scope3), угловой скорости ротора ВЭУ (Scope4), результирующего ветрового воздействия (Scope5) соответственно
Рекомендованные источники литературы:
1. Чи зможе ЄС вдвічі збільшити виробництво поновлюваної енергії, або про що йдеться у White Paper? / Гуннар Бой Ольсен // Зелена енергетика. - 2001. -Ne2.-C.4-5.
2. Кривцов В.С. Неисчерпаемая энергия. Кн. I. Ветроэнергогенераторы: учебник / Кривцов B.C. Олейников А.М., Яковлев А.И. - X.: Нац. аэрокосм, ун-т «Харьк. авиац. ин-т», Севастополь: Севаст. нац. полит, ун-т, 2003. – 400 с.
3. Солод М. Ветроэнергетика. Попытка реанимации? / М.Солод //Наука и техн и ка. 2008. -№ II-21-26.
4. Gasch R. Windkraftanlagen: Grundlagen und Entwif /R. Gasch. – Stulgart: Teibner, 1995. – 391 c.
5. Fernandez Die: Pedro. Energia colica / D.P Fernandez // Metalucguiz у elea tcicida - 1980. - Vol. 44. - № 509. - P. 63-68.
6. Сабинин Г.Х. Характеристики ветродвигателя в зависимости от направления ветра. Труды ЦАГИ / Г.Х Сабинин, – М.: ЦАГИ, Вып. 28, 1926. – 112 с.
7. Фатеев Е.М. Ветродвигатели и ветроустановки. Учебное пособие. / Е.М. Фатеев. – М.: Госиздат. с.-х. лит., 1957. – 536 с.

