 2015-05-12
2015-05-12 3287
3287Чувствительные элементы датчиков по принципу действия подразделяются на параметрические, в которых измеряемая величина воздействует на параметры чувствительного элемента (сопротивление R, емкость С, индуктивность L и т.д.), и генераторные, преобразующие неэлектрические величины в электрическую величину (напряжение, ток). Для работы параметрического датчика необходим внешний источник энергии.
К параметрическим чувствительным элементам относятся - контактные, реостатные, потенциометрические, тензометрические, терморезисторы, емкостные, индуктивные, фоторезисторные и др, к генераторным - термоэлектрические, индукционные, пьезоэлектрические, фотоэлементы и др.
Для построения чувствительных элементов датчиков используют ряд физических явлений, которые могут в зависимости от условий давать информацию о том или ином параметре технологического процесса. Принципы построения чувствительных элементов датчиков рассмотрим по физической природе преобразования информации.
9.2. 1. Механические чувствительные элементы датчиков
Наиболее простыми средствами получения информации о различных параметрах технологических процессов (положения деталей, тары, продукта на транспорте, уровня воды в емкости и др.) служат механические датчики — щупы, стержни, полозки, катки и т. п.
Механический чувствительный элемент (щуп) связан, как правило, с преобразовательно - усилительным звеном и находится в состоянии силового замыкания с источником информации. Определенная силовая настройка щупа позволяет выделить полезный сигнал, например, появление тары на транспортере.
На рис.9.3. показан пример механического датчика положения движущейся тары на транспортере. Датчик состоит из щупа 4 с противовесом 5, насаженного на ось вращения 10. В корпусе датчика имеется пара контактов 7 и 8 для включения внешней элекгрической цепи. Щуп имеет возможность при приближении банки 2 отклоняться на угол а.
До подхода банки 2 к позиции срабатывания датчика (рис.9.3а), определяемой осью 5, нижний конец щупа 4 под действием противовеса 5 опущен вертикально, параллельно этой оси. Контакты 7 разомкнуты, и во внешнюю цепь никакого сигнала не поступает.
В момент прихода банки 2 к положению, определяемому осью 9 (рис.9.3б), щуп 4 начинает отклоняться и своим противоположным концом замыкает контакты 7 и 8, которые дают сигнал в цепь управления "одна банка " прошла. Сигнал управления может представлять собой единичный электрический импульс, который считывается системой управления и используется для подсчета количества банок, остановки транспортера, подачи ящиков и т.д. После прохода банки 2 щуп освобождается и под действием противовеса 5 опускается в положение 9, ожидая прихода следующей банки 3 и т.д.
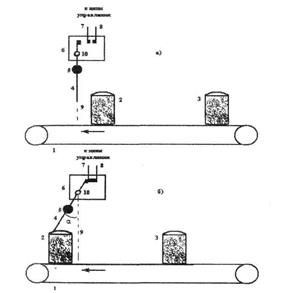
Рисунок 9 3 - Датчик положения с механическим чувствительным элементом: 1- транспортер; 2, 3- движущиеся банки; 4- чувствительный элемент-щуп; 5-противовес; 6- корпус датчика; 7,8- электрические контакты; 9- ось нейтрального положения щупа; 10- ось вращения щупа; а) положение щупа до подхода банки; б) положение щупа после подхода банки.
Другим примером механического датчика является известный поплавок" (рис.9.4) для определения уровня жидкости. В бак 1 поступает жидкость 2. Поплавок 4, соединенный рычагом 3 с контактной группой 6 и 7, заключенной в корпус 5.
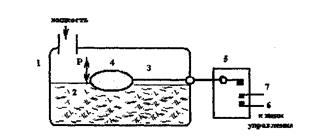
Рисунок 9.4 - Механический датчик "поплавок" для отслеживания уровня жидкости в баке: 1- бак для жидкости;
2 - жидкость; 3- рычаг; 4- поплавок; 5- корпус контактной группы; 6-7 - контактная группа.
При поступлении жидкости в бак 1 поплавок 4 поднимается вместе с ее уровнем. При достижении заданного уровня жидкости поплавок под действием выталкивающей его силы Р перемещает рычаг 3 вверх, который своим противоположным концом замыкает контактную группу 6-7, дающую сигнал управления, например, на прекращение подачи жидкости или ее откачки.








