 2015-05-13
2015-05-13 1600
1600Система управления включает в свой состав:
10) Канал управления по угловой скорости линии визирования
11) Канал управления по углу пеленга
12) Канал стабилизации угла крена блока управления
13) Канал демпфирования продольно-поперечных колебаний ракеты
Система управления ракеты С-25ЛД имеет те же каналы, что и система управления ракеты С-25Л. Отличие заключается в том, что канал управления по углу пеленга в ракете С-25Л используется только на активном участке полёта, а в ракете С-25ЛД – в течении всего времени полёта.
В системе наведения ракеты С-25Л на цель реализован закон пропорциональной навигации с одновременным использованием опорного (программного) значения угловой скорости линии визирования. В системе наведения ракеты С-25ЛД благодаря работе канала управления по углу пеленга в течении всего времени полёта реализуется также закон прямого наведении, т. е. используется комбинированный закон наведения. Благодаря этому достигается повышение точности наведения ракеты на цель.
Функциональная схема системы управления представлена в приложении 1.
Канал управления по угловой скорости линии визирования, обеспечивающий управление траекторией движения центра масс, является основным.
На активном участке полёта канал управления по углу пеленга необходим для уменьшения рассеивания и разворота ракеты на цель при стрельбе в направлении, отличающемся от направления полёта самолёта, а на пассивном участке – для уменьшения чувствительности канала управления по угловой скорости линии визирования к колебаниям пятна подсветки цели. Канал управления по углу пеленга служит для стабилизации ракеты по пеленгу, т. к. угол линии визирования цели за время полёта изменяется в ограниченных пределах.
Каналы стабилизации угла крена блока управления и демпфирования продольно – поперечных колебаний ракеты предназначены для обеспечения нормальных условий функционирования ГСН 24Н1 и других узлов блока в процессе наведения на цель.
В состав канала управления по угловой скорости линии визирования входят датчики угловой скорости линии визирования ГСН 24Н1, низкочастотные фильтры СКЛВ, усилители с изменяемым коэффициентов усиления, электронные ограничители 1 и 2 сигнала управления и ограничители рассогласования. К каналу управления функционально относятся также устройства формирования программного угла отклонения рулей в вертикальной плоскости.
Широтно – импульсно модулированные сигналы  и
и  с выхода ГСН поступают на вход фильтров низкой частоты СКЛВ. Фильтры предназначены для выделения постоянной составляющей и уменьшения уровня шумов. Отфильтрованные сигналы алгебраически суммируются с сигналами
с выхода ГСН поступают на вход фильтров низкой частоты СКЛВ. Фильтры предназначены для выделения постоянной составляющей и уменьшения уровня шумов. Отфильтрованные сигналы алгебраически суммируются с сигналами  формирователя программного угла отклонения рулей в вертикальной плоскости.
формирователя программного угла отклонения рулей в вертикальной плоскости.
Введение сигнала обеспечивает приближение траектории управляемого полёта к баллистической траектории, проходящей через цель.
Суммарные сигналы управления траекторным движением ракеты проходят через усилитель с изменяемым коэффициентом усиления и ограничители и поступают на входы рулевых приводов. Максимальный угол поворота рулей, ограниченный механическими упорами, равен 20º. Электронные ограничители 1 и 2 в канале управления траекторным движением ракеты, выполненные на операционных усилителях, не позволяют рулям, отклонятся на угол, превышающий 15º, обеспечивая возможность использования оставшихся 5º для стабилизации угла крена БУ.
Ограничители рассогласования необходимы для сохранения нормальной работоспособности канала стабилизации угла крена при резких изменениях сигналов управления с ГСН.
Усилители с изменяемым коэффициентом усиления применены в связи с существенным уменьшением коэффициента усиления по перегрузке канала управления на пассивном участке траектории полёта ракеты в связи с уменьшением её скорости.
Ступенчатое увеличение коэффициента усиления усилителем осуществляет реле времени РВ8.
Канал управления по угловой скорости линии визирования включается по окончании активного участка полёта по сигналу с инерционного переключателя. При этом происходит размыкание контактов реле  на выходе низкой частоты СКЛВ.
на выходе низкой частоты СКЛВ.
Канал управления по углу пеленга начинает работать через 0.5 с после схода ракеты из ПУ. В состав канала входят датчики углов пеленга ГСН, схема формирования сигналов управления по пеленгу, низкочастотные фильтры, электронные ограничители.
Для сохранения постоянного передаточного коэффициента канала пеленга сигналы с выхода ФНЧ пеленга суммируется с сигналами угловой скорости линии визирования после усилителя с изменяемым коэффициентом усиления.
Канал управления по углу пеленга ракеты С-25ЛД отличается от аналогичного канала ракеты С-25Л наличием схемы формирования сигналов управления по пеленгу. Указанная схема реализует следующие режимы работы канала управления по углу пеленга:
1. На активном участке полёта сигналы управления по углу пеленга в горизонтальной и вертикальной плоскостях идентичны
2. На пассивном участке полёта в вертикальной плоскости при углах пеленга от 0º до 6º сигнал управления не формируется, а в горизонтальной плоскости режим управления по углу пеленга сохраняется неизменным. Благодаря этому, при одновременной работе канала управления по угловой скорости линии визирования и канала управления по углу пеленга на пассивном участке обеспечивается полёт ракеты в вертикальной плоскости по траектории, приближающейся к баллистической.
Схема формирования сигналов управления по пеленгу состоит из усилителей с коэффициентов усиления равным 0.5, инверторов, сумматоров и блока нелинейности с характеристикой, приведённой на функциональной схеме (приложение 1).
На активном участке полёта до срабатывания инерционного переключателя (при этом контакт реле на функциональной схеме находится в верхнем положении) формирование сигналов управления по пеленгу осуществляется в соответствии со следующей зависимостью:
 (1)
(1)

 , (2)
, (2)
где  и
и  - сигналы управления по пеленгу в каналах управления 1 и 2;
- сигналы управления по пеленгу в каналах управления 1 и 2;
 и
и  - сигналы с выхода датчиков угла пеленга ГСН.
- сигналы с выхода датчиков угла пеленга ГСН.
Плоскости замера углов датчиками пеленга и принятое правило знаков представлены на рис. 5б.
На рис. 5в показан случай, когда имеется угол пеленга в вертикальной плоскости. Для этого случая выражения (1) и (2) будут иметь вид:


Для случая появления угла пеленга в горизонтальной плоскости (рис. 5г) с учётом знака углов пеленга выражения (1) и (2) принимают вид:


Схема формирования сигналов управления по пеленгу на активном участке полёта обеспечивает подачу на вход ФНЧ пеленга сигналов управления, аналогичных сигналам, непосредственно снимаемым с датчиков пеленга ГСН.
Управление по углу пеленга в вертикальной и горизонтальной плоскостях идентично. На этом участке полёта обеспечивается уменьшение рассеивания и разворот ракеты на цель в случае её нахождения в направлении, отличном от направления полёта самолёта.
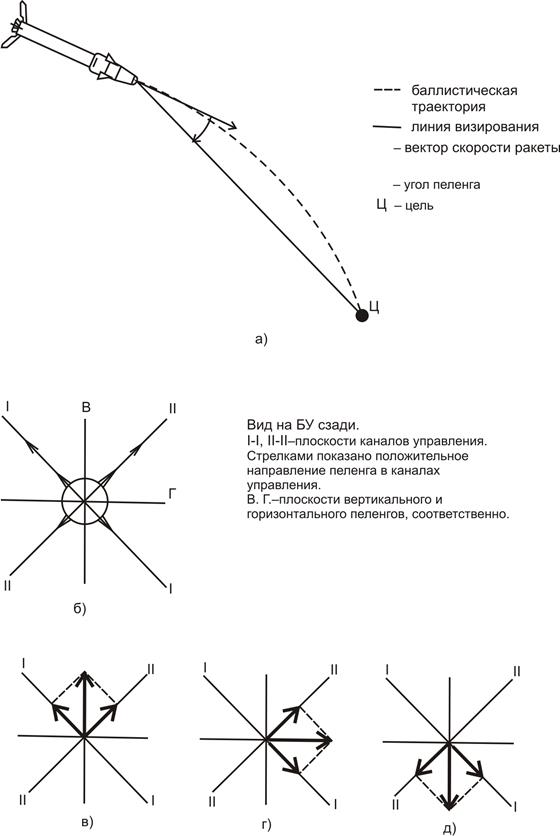 |
Рис. 5
На пассивном участке полёта после срабатывания инерционного переключателя формирования сигналов управления по пеленгу подчиняется следующим выражениям:
 (3)
(3)
 (4)
(4)
где  - сигнал на выходе блока нелинейности.
- сигнал на выходе блока нелинейности.
В зависимости от величины сигнала вертикального пеленга возможны три следующих случая:
1)  , при этом
, при этом  ;
;
2)  , при этом
, при этом  ;
;
3)  , при этом
, при этом  .
.
В 1-ом случае (положительному пеленгу в вертикальной плоскости соответствует схема на рис. 5в) управляющие сигналы по пеленгу формируются так же, как на активном участке полёта.
Во 2-ом случае (отрицательному пеленгу в вертикальной плоскости соответствует схема на рис. 5д) сигналы управления по пеленгу с учётом полярности сигналов с датчиков пеленга формируются следующим образом:


В общем случае возможно появление углов пеленга одновременно в вертикальной и горизонтальной плоскостях.
Используя метод суперпозиции, выражения для сигналов управления при пеленге в горизонтальной плоскости (рис. 5г), можно представить в следующем виде:
 (5)
(5)
 (6)
(6)
В выражениях (5) и (6) составляющая  равна 0, т. к. сигнал
равна 0, т. к. сигнал  на входе блока нелинейности с учётом полярности сигналов с датчиков пеленга равен:
на входе блока нелинейности с учётом полярности сигналов с датчиков пеленга равен:

Так как для блока управления, стабилизирующего по крену в положении Х ("Икс"), сигнал  и
и  (рис. 5в) равны по абсолютной величине, т. е.
(рис. 5в) равны по абсолютной величине, т. е.  , то выражения (5) и (6) принимают вид:
, то выражения (5) и (6) принимают вид:


Таким образом, при работа схемы формирования сигналов управления по пеленгу отличается от её работы на активном участке только тем, что в вертикальной плоскости сигналы управления формируются не относительно нулевого уровня, а относительно уровня  . Закон формирования сигналов управления в горизонтальной плоскости остаётся неизменным.
. Закон формирования сигналов управления в горизонтальной плоскости остаётся неизменным.
В 3-ем случае при пеленге в вертикальной плоскости (рис. 5д) выражения (3) и (4) имеют вид:


Но учитывая, что предыдущие выражения можно записать:


При пеленге в горизонтальной плоскости (рис. 10г) может быть получен тот же результат, что и во 2-ом случае при горизонтальном пеленге, т. е.:
Таким образом, схема формирования сигналов управления по пеленгу обеспечивает управление в плоскости вертикального и горизонтального пеленга, и лишь на пассивном участке полёта при наличии отрицательного вертикального угла пеленга в диапазоне от 0 до 8° управляющий сигнал пеленга в вертикальной плоскости не формируется.
Для устойчивости контура управления по углу пеленга одновременно с ним включается канал демпфирования продольно-поперечных колебаний, который функционирует в течение всего времени полёта ракеты. Сигнал канала демпфирования получается дифференцированием сигнала датчика угла пеленга с помощью дифференцирующего операционного усилителя.
Сигналы демпфирования могут принимать значения, вызывающие отклонение рулей на 20° до механического упора, что приводит к потере работоспособности канала крена. Благодаря электронным ограничителям 2 сигнала демпфирования  , поступающий на вход рулевого привода, не превышает значений, отклоняющих рули на 15°.
, поступающий на вход рулевого привода, не превышает значений, отклоняющих рули на 15°.
Канал стабилизации угла крена включается сразу же с момента выхода ракеты из пускового устройства. В состав канал крена входят: датчик угла крена (ДУК), усилитель с изменяемым коэффициентом усиления, фильтр низкой частоты. Питание потенциометра ДУК осуществляется напряжением  , поступающим из формирователя программного угла. Таким образом обеспечивается изменение передаточного числа по углу крена, приближённо компенсирующее изменение эффективности рулей по мере уменьшения скорости полёта ракеты.
, поступающим из формирователя программного угла. Таким образом обеспечивается изменение передаточного числа по углу крена, приближённо компенсирующее изменение эффективности рулей по мере уменьшения скорости полёта ракеты.
Если изменение передаточного числа за счёт изменения напряжения ДУК осуществляется по закону, близкому к линейному, то переключения в цепи обратной связи усилителя с изменяемым коэффициентом усиления приводят к ступенчатому изменению передаточного числа. Переключение в цепи обратной связи происходит при срабатывании реле времени РВ 0.5 и РВ 8.
До срабатывания реле времени РВ 8 стабилизация угла крена осуществляется одной парой рулей (рулевые привода №1 и 3). После срабатывания реле времени подключается вторая пара рулей (рулевые приводы №2 и 4).
Сигналы каналов управления скорости линии визирования, по углу пеленга, каналов демпфирования и стабилизации угла крена поступают на входы релейных усилителей (УР), где происходит их сравнение с напряжением потенциометров обратной связи (ПОС). Полученный сигнал рассогласования суммируется с сигналом генератора низкой частоты (ГНЧ) и поступает на вход порогового устройства. Пороговое устройство и ГНЧ преобразуют непрерывный сигнал рассогласования в широтно-импульсно модулированный (ШИМ). При этом линейный диапазон преобразования определяется амплитудой сигнала ГНЧ.
При больших уровнях сигнала рассогласования режим работы-релейный. Сигналы с выхода порогового устройства поступают на выходные каскады УР, работающие в ключевом (релейном) режиме. Нагрузкой выходных каскадов являются катушки электромагнитного преобразователя (ЭМП). Под действием тока в катушках якорь ЭМП, определяющий воздухораспределение в полостях рулевой машины (РМ), отклоняется от упора до упора. При отсутствии сигнала рассогласования время пребывания якоря ЭМП на левом и правом упоре под действием сигналов ГНЧ одинаково и разность давлений в полостях РМ равна нулю.
При появлении сигнала рассогласования, не превышающего линейный диапазон ШИМ-преобразования, время нахождения якоря на левом и правом упорах различно, и разность давлений в полостях, а следовательно, и скорость перемещения руля руля пропорциональны величине сигнала рассогласования. При сигналах рассогласования, превышающих линейный диапазон, якорь находится на одном упоре, соответствующем полярности сигнала рассогласования. В этом случае разность давлений давлений и скорость перемещения руля имеют постоянное максимальное значение.
Питание газовых РМ осуществляется от порохового аккумулятора давления (ПАД).
Электропитание блока управления обеспечивается четырьмя электрохимическими твёрдосолевыми батареями Т-454 с еноминальным напряжением 27 В. Две батареи (БИГ1 и БИГ2), включённые параллельно, обеспечивают питание ГСН-24Н1; по одной батарее используется для питания блока электроники (БИАО1) и электронного трёхфазного преобразователя напряжения (БИАО2). Преобразователь обеспечивает питание гиромотора ГСН при автономном полёте ракеты.

