 2015-05-13
2015-05-13 1603
1603Понятие управляемости используется при проверке условий разрешимости задачи синтеза для линейных систем, поведение которых описывают уравнения состояния.
Рассмотрим условие управляемости для общего класса объектов вида
 (6.12)
(6.12)
Объект (6.12) называется управляемым, если существует ограниченное управляющее воздействие  с помощью которого можно перевести его из начального состояния
с помощью которого можно перевести его из начального состояния  в заданное конечное
в заданное конечное  за конечное время T.
за конечное время T.
Проверяется это условие с помощью критерия управляемости, его формулировку приведем без доказательства [1]. Объект (6.12) будет управляем тогда и только тогда, когда матрица управ-
ляемости
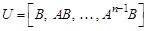 (6.13)
(6.13)
имеет полный ранг.
Так как матрица U имеет n строк и  столбцов, то критерий управляемости записывается в виде
столбцов, то критерий управляемости записывается в виде
 (6.14)
(6.14)
Определить, имеет ли матрица полный ранг, можно по соотно-шению
 (6.15)
(6.15)
которое легко проверить, например, с помощью пакета Matlab.
В случае одноканального объекта (когда  ) матрица управляемости будет квадратной и критерий (6.14) принимает форму
) матрица управляемости будет квадратной и критерий (6.14) принимает форму
 (6.16)
(6.16)
Отметим, что задача синтеза будет иметь решение, если объект управляем, т.е. условие управляемости является условием разрешимости задачи синтеза.
Однако невыполнение условия (6.14) еще не означает, что такой объект нельзя стабилизировать. В случае, когда  и объект (6.12) не полностью управляем, с помощью специального невырожденного преобразования переменных
и объект (6.12) не полностью управляем, с помощью специального невырожденного преобразования переменных

его описание можно привести к канонической форме
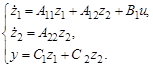 (6.17)
(6.17)
 |
Здесь переменные
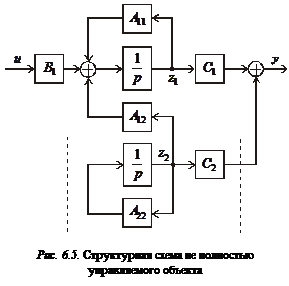
 характеризуют автономную часть объекта, называемую неуправляемой. Структурная схема такого объекта приведена на рис. 6.5. пунктиром выделена неуправляемая часть объекта, процессы в которой развиваются в силу собственных свойств. Изменить их с помощью управления невозможно, однако переменные влияют на управляемую часть и выходные переменные y. Если неуправляемая часть будет неустойчива, то и весь объект будет не только неустойчивым, но и нестабилизируемым.
характеризуют автономную часть объекта, называемую неуправляемой. Структурная схема такого объекта приведена на рис. 6.5. пунктиром выделена неуправляемая часть объекта, процессы в которой развиваются в силу собственных свойств. Изменить их с помощью управления невозможно, однако переменные влияют на управляемую часть и выходные переменные y. Если неуправляемая часть будет неустойчива, то и весь объект будет не только неустойчивым, но и нестабилизируемым. Таким образом, для не полностью управляемого объекта условием разрешимости задачи синтеза является требование устойчивости неуправляемой части.
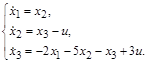
Пример 6.2
Проверить управляемость объекта, поведение которого описывает следующая система дифференциальных уравнений:
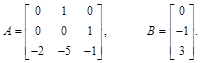
Определим матрицы
Запишем матрицу управляемости в виде 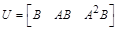 и вычислим матрицы произведений
и вычислим матрицы произведений
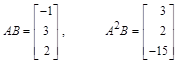 .
.
Составим матрицу управляемости

и найдем ее определитель  следовательно, объект управ-
следовательно, объект управ-
ляем.

