 2015-05-26
2015-05-26 261
261Устанавливаем и поддерживаем постоянными добавочное сопротивление в цепи якоря R Д = 0, номинальное напряжение на схеме U = U Н и номинальную частоту вращения n = nН. Будем изменять момент на валу двигателя от M 2 ≈ 1,2 M 2Н до M 2 = 0 и ток возбуждения i В, контролируя постоянство n = nН и U = U Н. Измерим ток возбуждения i В и ток якоря Ia. Результаты занесём в таблицу 3. Вычисляем P 1, P 2 и η по формулам из п.1.
Таблица 3: регулировочные характеристики двигателя параллельного возбуждения.
| Измеренные величины | Расчётные величины | ||||
| M 2 | Ia | i В | P 1 | P 2 | η |
| кг ∙ м | А | Вт | – | ||
| 3.3 | 0.50 | 0.78 | |||
| 2.1 | 13.5 | 0.65 | 0.77 | ||
| 1.5 | 9.5 | 0.70 | 0.77 | ||
| 1.0 | 0.75 | 0.69 | |||
| 0.4 | 0.80 | 0.48 | |||
| 0.0 | 0.90 | 0.00 |
По результатам таблицы 3 построим график 3.
График 3: регулировочные характеристики двигателя.
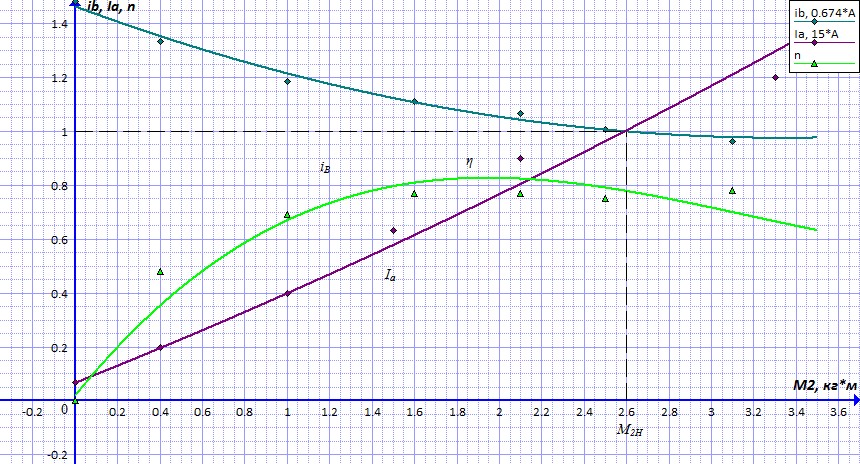
Определим из графика изменение тока возбуждения Δi В, необходимое для поддержания номинальной частоты вращения при изменении нагрузки двигателя от номинальной до нуля:









