 2015-05-26
2015-05-26 5369
5369Как следует из уравнения электромеханической характеристики (3.1) угловую скорость вращения можно регулировать, как и у ДПТ с НВ, изменением  ,
,  и
и  .
.
Регулирование скорости вращения изменением питающего напряжения
Как следует из выражения механической характеристики (3.1) при изменении питающего напряжения можно получить семейство механические характеристик, изображенных на рис. 3.4. При этом величина напряжения питания регулируется, как правило, при помощи тиристорных преобразователей напряжения или систем «Генератор-двигатель».

Рис 3.4. Семейство механических характеристик ДПТ с ПВ при различных значениях напряжения питания якорной цепи  <
<  <
<  .
.
Диапазон регулирования скорости разомкнутых систем не превышает 4:1, но при введении обратных связей он может быть на несколько порядков выше. Регулирование угловой скорости вращения в этом случае осуществляется вниз от основной (основной скоростью называется скорость, соответствующая естественной механической характеристике). Достоинством способа является высокий КПД.
Регулирование угловой скорости вращения ДПТ с ПВ введением последовательного добавочного сопротивления в цепь якоря
Как следует из выражения (3.1) последовательное введение добавочного сопротивления изменяет жесткость механических характеристик и также обеспечивает регулирование угловой скорости вращение идеального холостого хода  .
.
Семейство механических характеристик ДПТ с ПВ для различных значений добавочного сопротивления  (рис. 3.1) представлено на рис. 3.5.
(рис. 3.1) представлено на рис. 3.5.

Рис. 3.5 Семейство механических характеристик ДПТ с ПВ при различных значениях последовательного добавочного сопротивления  <
<  <
<  .
.
Регулирование  осуществляется вниз от основной скорости.
осуществляется вниз от основной скорости.
Диапазон регулирования при этом обычно не превышает 2,5:1 и зависит от нагрузки. Регулирование при этом целесообразно проводить при постоянном моменте сопротивления.
Достоинством данного способа регулирования является его простота, а недостатком большие потери энергии на добавочном сопротивлении.
Этот способ регулирования нашел широкое применение в крановых и тяговых электроприводах.
Регулирование угловой скорости вращения
изменением потока возбуждения
Так как у ДПТ с ПВ обмотка якоря двигателя последовательно связана с обмоткой возбуждения, то для изменения величины потока возбуждения необходимо зашунтировать обмотку возбуждения реостатом  (рис. 3.6), изменения положения которого влияет на ток возбуждения. Ток возбуждения в этом случае определяется как разность между током якоря
(рис. 3.6), изменения положения которого влияет на ток возбуждения. Ток возбуждения в этом случае определяется как разность между током якоря  и током в шунтирующем сопротивлении
и током в шунтирующем сопротивлении  . Так в предельных случаях
. Так в предельных случаях  при
при  ∞ и
∞ и  при
при  .
.
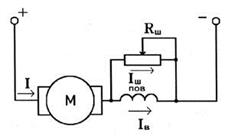
Рис. 3.6. Схема электрическая принципиальная регулирования угловой скорости вращения ДПТ с ПВ изменением потока возбуждения .
Регулирование осуществляется в этом случае вверх от основной угловой скорости вращения, вследствие уменьшения величины магнитного потока. Семейство механических характеристик ДПТ с ПВ для различных значений шунтирующего реостата представлено на рис. 3.7.

Рис. 3.7. Механические характеристики ДПВ с ПВ при различных значениях шунтирующего сопротивления 
С уменьшением величины  возрастает. Данный способ регулирования является достаточно экономичным, т.к. величина сопротивления последовательной обмотки возбуждения мала и, соответственно, величина
возрастает. Данный способ регулирования является достаточно экономичным, т.к. величина сопротивления последовательной обмотки возбуждения мала и, соответственно, величина  также выбирается малой.
также выбирается малой.
Потери энергии в этом случае примерно такие же, как у ДПТ с НВ при регулировании угловой скорости изменением потока возбуждения. Диапазон регулирования при этом, как правило, не превышает 2:1 при постоянной нагрузке.
Способ находит применение в электроприводах требующих ускорения при малых нагрузках, например, в безмаховиковых ножницах блюмингов.
Все перечисленные выше способы регулирования характеризуются отсутствием конечной угловой скорости вращения идеального холостого хода  , но необходимо знать, что существуют схемотехнические решения, позволяющие получать конечные значения
, но необходимо знать, что существуют схемотехнические решения, позволяющие получать конечные значения  .
.
Для этого шунтируются реостатами  обе обмотки двигателя или только обмотка якоря. Эти способы неэкономичны в энергетическом отношении, но позволяют достаточно кратковременно получать характеристики повышенной жесткости с малыми конечными скоростями идеального холостого хода. Диапазон регулирования при этом не превышает 3:1, а регулирование скорости осуществляется вниз от основной. При переходе в генераторный режим в этом случае ДПТ с ПВ не отдает энергию в сеть, а работает генератором замкнутым на сопротивление .
обе обмотки двигателя или только обмотка якоря. Эти способы неэкономичны в энергетическом отношении, но позволяют достаточно кратковременно получать характеристики повышенной жесткости с малыми конечными скоростями идеального холостого хода. Диапазон регулирования при этом не превышает 3:1, а регулирование скорости осуществляется вниз от основной. При переходе в генераторный режим в этом случае ДПТ с ПВ не отдает энергию в сеть, а работает генератором замкнутым на сопротивление .
Необходимо отметить, что в автоматизированных электроприводах величина сопротивления регулируется, как правило, импульсным методом периодическим шунтированием полупроводниковым вентилем сопротивлений  или
или  с определенной скважностью.
с определенной скважностью.

