 2015-06-14
2015-06-14 1216
1216Управлением называется целенаправленное воздействие на систему. Смысл и значение понятия “управление” выходят за рамки системного анализа, а в самом прикладном системном анализе это понятие занимает центральное место. Поэтому важно разобраться в деталях и нюансах этого понятия.
ОБЪЕКТ УПРАВЛЕНИЯ
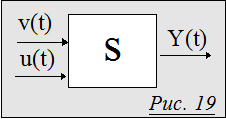 |
Обозначим выходы некоторой реальной системы S символом Y(t), а входы еe разделим на управляемые извне u(t) и не управляемые v(t) (Рис.19). Само выделение управляемых входов означает,что мы рассматриваем систему S как объект управления. Выходы Y(t) являются результатом преобразования системой S входов v(t) и u(t): Y(t)=S(v(t),u(t)), что позволяет воздействовать на Y(t) путем выбора различных управлений u(t).
ЦЕЛЬ УПРАВЛЕНИЯ
Пусть состояние на выходе системы S в момент времени t=0 есть Y и я, как субъект, этим недоволен. Значит существующая ситуация является для меня проблемной (см.Гл.I), и я хотел бы ее изменить. Желательным уровнем величины Y для меня было бы Y*, пока не существующее в момент t=0. Чтобы повысить уверенность в достижении поставленной субъективной цели (см.Гл.II,п.12), нужно дополнить ее описание соблюдением известных нам объективных и субъективных условий и ограничений. Например: если известно, что Y(t) физически не в состоянии меняться очень быстро, я назначаю ближайший реальный (по моему мнению) срок T* достижения величины Y* (см.Рис.20); теперь точка (Y*,T*) является моей конечной целью. Но прибыть в эту точку можно по разным траекториям, и эти траектории могут быть для меня не одинаково оцениваемыми.
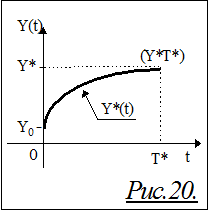 |
Учитывая теперь остальные известные мне ограничения и требования, я выбираю наилучшую (в смысле критериев, выражающих эти требования и ограничения) траекторию Y*(t). Теперь Y*(t) является полным описанием нашей цели.
Подчеркнем два момента. Первый состоит в том, что, хотя мы и постарались учесть все ограничения при формулировке цели, она остается субъективной: во-первых, мы учли только то, что нам известно, а наши знания всегда ограничены; во-вторых, то, как именно и насколько правильно мы это сделали - итог нашей работы, неизбежно несущей отпечаток нашей личности. Так что вопрос о фактической достижимости поставленной цели системой S остается открытым.
Второй момент - предлагаемое определение цели является собирательным: оно объединяет все аспекты желаемого будущего. Всякую деятельность (в том числе управление), приведшую к реализации цели, мы называем эффективной. Интересно, что в английском языке имеется терминологическое различие между УСПЕШНОСТЬЮ достижения конечной цели (Y*,T*) (EFFECTIVENESS), и УС ПЕШНОСТЬЮ движения к ней по оптимальной траектории Y*(t) (EFFICIENCY). Оба слова на русский язык переводятся одним, огрубленным словом "эффективность".
Итак, далее функцию Y*(t), вместе с ее концом (Y*, t=T*), но без точки (Y 0, t=0), будем называть просто целью.
УПРАВЛЯЮЩЕЕ ВОЗДЕЙСТВИЕ
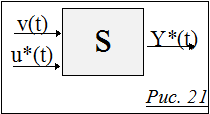 |
Тот факт,что входы и выходы системы S связаны между собой некоторым соотношением Y(t)=S(v(t),u(t)), позволяет надеяться на то, что существует такое управляющее воздействие u*(t), при котором на выходе реализуется цель Y*(t) (см.Рис.21). Но как узнать, действительно ли оно существует, и если да, то каково оно? Из-за потерь при неправильном воздействии обычно неразумно, часто недопустимо, а иногда - невозможно перебирать все возможные {u(t)} прямо на входе самой реальной системы в попытках угадать, наконец, u*(t). А что взамен? Заменой самой системе является ее модель.
МОДЕЛЬ СИСТЕМЫ
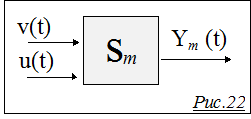 |
Из того, что мы знаем о системе S, мы выделяем сведения, позволяющие построить модель S m, описывающие связь входов и выходов системы: Y m = S m (v(t), u(t)). Подчеркнем, что это не сама система S, а ее описание, модель S m, наше представление о том, как система преобразует входы в выход (Рис.22). С моделью мы мы можем обращаться более свободно: хотя при подаче на вход модели неудачного управления u(t) мы тоже несем потери (тратим время и другие ресурсы, нужные для работы модели), но эти потери обычно несравнимо меньше тех, которые мы понесли бы, осуществив это неудачное управление на самой системе.* Поэтому на модели мы можем делать то, что очень нежелательно делать в реальности: перебирать любые воздействия в любом порядке, и смотреть, что получится.
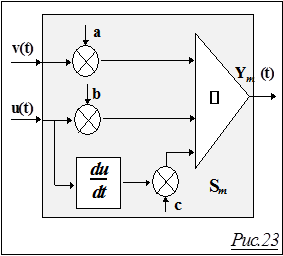 |
Модель может быть абстрактной - на языке любого уровня, от словесного (типа "если <u i,v >, то <Y i>, i=1,2,...,N" до математического (типа уравнения Y(t)=av(t)+bu(t)+c  , или на некотором профессиональном языке (типа блок-схемы на Рис.23). А может быть реальной - в виде некоторого устройства, изображающего действие системы (например, схему на Рис.23 можно набрать из элементов аналоговых вычислительных устройств). Таким устройством может быть и цифровая ЭВМ, в которую введена программа выполнения всех операций, входящих в уравнение Y m (t)=S m (v(t),u(t)).
, или на некотором профессиональном языке (типа блок-схемы на Рис.23). А может быть реальной - в виде некоторого устройства, изображающего действие системы (например, схему на Рис.23 можно набрать из элементов аналоговых вычислительных устройств). Таким устройством может быть и цифровая ЭВМ, в которую введена программа выполнения всех операций, входящих в уравнение Y m (t)=S m (v(t),u(t)).
БЛОК УПРАВЛЕНИЯ
Итак, в акте управления можно уже различить два этапа. Первый - нахождение нужного управляющего воздействия с помощью модели системы. Второй - осуществление найденного воздействия на входе реальной системы. Как мы увидим дальше, для управления иногда могут потребоваться и другие действия, но эти два - обязательно.
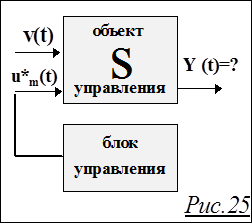 |
Все действия, необходимые для управления, должны быть выполнены. Эта функция возлагается обычно на специально создаваемую для этого систему, называемую блоком управления, или системой (подсистемой) управления, или управляющим устройством, и т.п. (см.Рис.24). В реальности блок управления физически может быть подсистемой управляющей системы (как заводоуправление - часть завода, автопилот - часть самолета). Но может воздействовать на систему и извне (как министерство на подчиненное предприятие, как аэродромный диспетчер на идущий на посадку самолет). Таким образом, при описании ситуации "объект управления - блок управления" мы сталкиваемся со всеми сложностями построения модели состава, обсужденными ранее в главе II, в виде неоднозначности проведения границы между объектом управления и управляющей системой.
ЭТАП НАХОЖДЕНИЯ НУЖНОГО УПРАВЛЕНИЯ
Рассмотрим принципы работы с моделью S m для поиска наилучшего управления. Употребив оценочное слово “наилучший”, мы обязаны точно указать, в каком смысле употребляется эта оценка, т.е. задать критерий качества. Ясно, что управление "тем лучше", чем ближе выход системы Y(t) к цели Y*(t). Но искать-то это управление мы будем на модели; поэтому на этапе поиска управления нам придется считать наилучшим то управление u* m (t), которое максимально приблизит к Y*(t) выход модели Y m (t). Что значит "Y m (t) и Y*(t) близки (или далеки)"? Надо ввести критерий близости двух функций, некоторое число r, которое было бы нулем только при Y m (t)=Y*(t), и возрастало бы при любом их различии. Таких чисел ("расстояний" между двумя функциями) можно ввести много, и по-разному (например,
r1=maxt (Ym(t)-Y*(t)), r2=ò (Ym(t)-Y*(t))Іdt, и т.д.).
Выберем некоторую меру различия двух функций r1,r2 в этой записи явно фигурируют входные функции u и v, чтобы подчеркнуть, что разница между Ym(t) и Y*(t) зависит от того, что есть на входах.
А теперь нам остается решить задачу на отыскание такого u* m (t), которое доставляет функционалу r минимум (лучше - ноль):......
******здесь должна быть формула
Пусть эта математическая формула не отпугивает гуманитариев, которые начали изучать данный курс, испытывая аллергию к математике: это всего лишь краткая символическая запись того, что так долго пояснялось "нормальными словами" (хотелось бы, чтобы гуманитарии оценили сжатость математического языка).
ЭТАП ИСПОЛНЕНИЯ УПРАВЛЕНИЯ
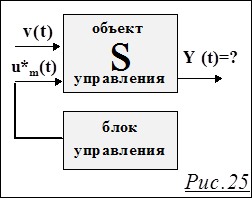 |
Решив на предыдущем этапе задачу нахождения управления u* m. (t), мы переходим к этапу осуществления этого воздействия на управляемом входе системы S (см.Рис.25). Самое интригующее - что же получится на выходе системы S? А получиться может что угодно. Рассмотрим два крайних случая.
Простая система. Самый благоприятный случай наступает, когда на выходе реальной системы S осуществляется то же, что получалось на выходе модели Sm: Y(t)=Y m (t)=Y*(t). Это значит, что наша модель является адекватной (по отношению к цели Y*, см.§3.3). Систему S в этом случае будем называть простой, воздействие u* m. (t) - программой, а данный тип управления - программным управлением.
Программное управление применяется для управления системами, поведение которых в известных обстоятельствах вполне предсказуемо: ЭВМ, телефоны, стрелковое оружие, любые автоматы, идеальное воинское подразделение, образцовый слуга и т.п.
Сложная система.
Другой возможный случай - система S откликается на воздействие u* m. (t) не так, как модель Sm: Y(t)=S(v(t),u* m. (t)¹Y*(t). Значит наша модель неадекватна: мы не смогли с ее помощью достичь цели. Система отреагировала не так, как мы ожидали. (Эта чертова штука ведет себя не так, как ей положено!"). Такую систему будем называть сложной. Причиной сложности системы S при таком подходе оказывается неадекватность ее модели Sm.
Это очень существенный момент для всего дальнейшего. Приняв такое определение сложности[1], мы получаем ясное представление о том, как преодолевать сложность. Есть два пути для этого: 1)изменять модель, стараясь повысить ее адекватность, "приближая модель к системе"; 2) вносить изменения в саму систему, пытаясь ее упростить, "приближая ее к модели". Рассмотрим обе возможности в отдельности.
МЕТОД ПРОБ И ОШИБОК
Неадекватность модели означает одно: в модели нехватает информации о системе. И если мы хотим или вынуждены иметь дело именно с данной системой, не изменяя ее саму, то наша задача - добыть эту недостающую информацию. Будем считать, что создавая исходную модель Sm, мы не ограничились только собственными представлениями, а использовали все доступные нам знания об S, накопленные в книгах, базах знаний, умах экспертов. Если и при этом система осталась сложной, то единственным источником информации остается только она сама, точнее - эксперимент с нею.
Такое обращение с системой,-экспериментирование над системой в ходе управления ею, -называется методом проб и ошибок. Важно понимать что метод проб и ошибок - единственно возможный метод управления сложной системой. Не менее важно понимать, что это - не метод "тыка", при котором каждое следующее пробное воздействие делается наугад. Метод проб и ошибок ориентирован на минимизацию потерь, к сожалению, неизбежных при совершаемых ошибках. Поэтому очередное пробное воздействие отыскивается опять на модели, но "исправленной и дополненной" с учетом предыдущей ошибки. Так что метод проб и ошибок состоит в циклическом повторении операций <<нахождение на модели № i наилучшего воздействия u* i. (t) —исполнение u* m. (t) на реальной системе S a извлечение дополнительной информации об S из "пробы - ошибки” a внесение коррекции в модель:S mi aS mi+1. a. переход к i +1 шагу.>>
КОРРЕКЦИЯ МОДЕЛИ НА ОСНОВАНИИ ОЧЕРЕДНОГО ЭКСПЕРИМЕНТА.
Конкретизируем, как именно производится коррекция модели по результатам последней ошибочной пробы. Старая модель давала прогноз: если на входе v(t) и u* m1. (t), то на выходе должно быть Y*(t). Реальная же система ответила: если на входе v(t) и u* m1. (t), то на выходе Y1(t) ¹Y*(t). Следовательно, мы должны поправить модель, причем так, чтобы новый вариант модели давал отклик Y1(t) на входные воздействия v(t) и u1*(t).
В некоторых случаях такая коррекция делается просто: если модель представлена списком соотношений “если <…>, то <…>”, то поправка сводится к замене одной строки на другую. Но если модель имеет другую форму, то ее исправление лишь отчасти может быть выполнено формально, и в значительной мере является объектом изобретательства, искусства. Проиллюстрируем эти два вартанта примерами.
Первый пример. Вы забыли код, набранный вами на дверце автоматической камеры хранения. Система стала для вас сложной. Приходится пользоваться методом проб и ошибок. Модель имеющаяся у вас, имеет вид: “если набрать код i, то дверь, возможно, откроется (i=1,2,...N, N-число всех комбинаций). При каком-то коде она откроется обязательно”. Вы выбираете способ перебора кодов, который вам нравится больше других (случайный; по порядку номеров; сначала все нечетные; сначала все простые; и т.д.) и начинаете с первого кода. Если дверь открылась, вы превратили систему вновь в простую. Коррекция модели: в первой строке заменяете слова "возможно, откроется" на "откроется", а в остальных - на "не откроется". Если нет - вы в первой строке заменяете слова "возможно, откроется" на "не открывается". Неопределенность уменьшается, но не исчезает, и система остается сложной. Далее - последующая итерация.
Второй пример. Ваша модель S m1. имеет вид уравнения, например типа
Y* 1m (t)=av(t)+.
После первой пробы на S имеем:
Y1(t)=av(t).........
Нам надо так откорректировать модель. чтобы она на входы v(t),u*1(t) тоже давала Y1(t). Тут-то и пояляется возможность попробовать формальный путь: варьировать коэффициенты a,b и с. Если это не приведет к успеху, придется прибегнуть к творчеству: варьировать степени переменных, вводить новые члены, стараясь решить задачу. Но и добившись этого, мы не до конца уверены, что теперь SºS m., т.к. их совпадение достигнуто только на данной комбинации входов и выходов. Далее - следующая итерация: метод проб и ошибок предписывает повторять циклы один за другим в стремлении к уменьшению сложности.
Становится ясно, что сложность системы может иметь разную степень выраженности. Практика показывает, что многие сложные системы методом проб и ошибок могут быть превращены в простые иногда за несколько шагов (например, управлять автомобилем), часто потребуется значительное, но конечное число итераций (например, разработать улучшающее вмешательство в проблемную ситуацию, вырастить квалифицированного специалиста). Но есть и системы сложность которых столь велика, что человечество не смогло преодолеть ее за все время своего существования, и можно думать, что они остануться сложными и в будущем (мозг; само человеческое общество; его частные проявления, такие, как экономика, отношения власти; вселенная). Можно принять предложение отцов кибернетики последние системы называть очень сложными, но важно подчеркнуть, что даже при очевидной бесконечности процесса преодоления их сложности, прогресс все же возможен, и именно методом проб и ошибок, хотя ясно, что не на пути постановки конечной цели, а на пути преодоления конкретных препятствий,определения конкретных ограничений, в рамках которых остается свобода для проб и ошибок,
И последнее замечание. Для снижения неизбежных потерь при управлении методом проб и ошибок имеются всего две возможности. Первая - не повторять ошибок, совершенных в прошлом (запрет на уже использованные воздействия). Вторая - ликвидация потерь полезной информации в ходе ее преобразования из формы {u* i. (t),Y i. (t)} в форму S mi aS m(i+1). Поэтому так важно совершенствование методов извлечения как можно большей доли полезной информации из результатов опыта. Этим занимаются многие дисциплины: анализ данных, математическая статистика, теория информации, теория моделирования, планирование экспериментов, анализ сцен и распознавание образов, искуссвенный интеллект, и т.д.
Итак программное управление и метод проб и ошибок исчерпывают наши возможности управления, если мы воздействуем на систему, не изменяя ее, а опираясь только на результаты ее моделирования.
Обратимся теперь к возможностям управления, которые открываются, если мы можем что-то изменять в самой системе. Таких возможностей две.
РЕГУЛИРОВАНИЕ
Первая - изменять некоторые параметры (внутренние переменные) системы. Этот тип управления иногда называют управлением по параметрам. Оно позволяет преодолевать сложность системы, при которой она "не слишком" отличается от простой. Поясним, что это значит.
Пусть на основе модели. S m рассчитана целевая траектория системы Y*(t) (в этом случае она называется "опорной"). Реализуя соответствующую программу u*(t), мы запускаем систему по опорной траектории (летчик получает полетное задание, шофер - маршрут следования и график движения по нему, следящее устройство - уставку, и т.п.). Но скоро выясняется, что реальность несколько сложнее (летчику мешает ветер, шоферу - непредвиденные задержки и объезды, станок сбивается с уставки), и система "сходит" с опорной траектории. Но не слишком далеко, и не слишком быстро - так, что остается возможность вернуть ее на опорную траекторию: это целесообразно, поскольку это приведет нас к цели, хотя и "приблизительно" (см.Рис.26). Управление путем приблизительного удержания системы на целевой траектории за счет изменения некоторых параметров системы называется регулированием. Для осуществления регулирования нужно устройство (называемое регулятором), выполняющее новые функции, которых не требовалось при программном управлении:
1)держать в памяти опорную траекторию Y*(t);
2)следить за реальной траекторией Y(t), поскольку она может отличаться от Y*(t);
3)обнаруживать текущее различие между Y*(t) и Y(t) (причем в разных ситуациях может потребоватся следить за разными характеристиками их различия: просто разницей; квадратом разности; разницей производных какого-то порядка; других мер различия).
4)вырабатывать корректирующее, дополнительное к u*(t) воздействие на параметры системы, подавая его на исполнительное устройство, осуществляя отрицательную обратную связь (так называется связь от выхода (Y(t)) ко входу (u(t)), уменьшая разницу между Y и Y*). Поэтому говорят о программном управлении как об управлении без обратной связи, а о регулировании - как об управлении с отрицательной обратной связью.
Устройство, выполняющее эти функции называется регулятором (см.Рис.27). Легко видеть, что регулятор может быть отнесен к самой системе, а может - к управляющему блоку. Например, набрав высоту и задав курс (Y*(t)), летчик включает регулятор (автопилот), входящий в состав самого самолета. Вернувшись к режиму ручного управления, летчик сам выполняет большинство функций регулятора.
Главным условием осуществимости регулирования является "достаточная малость" и "достаточная медленность" уклонения системы от целевой траектории, - достаточные для того, чтобы систему можно быть вернуть на нее.
УПРАВЛЕНИЕ ПО СТРУКТУРЕ
Условие "малости отклонений" в ряде случаев может не выполняться: как ни меняй параметры, система не вернется на опорную траекторию. Это означает, что цель Y*(t), а снею и конечный пункт (Y*,T*), - для данной системы недостижимы. Но, может быть, этот пункт может быть достигнут другой системой? Это и открывает еще одну возможность для управления: изменить в момент T s структуру системы, создавая тем самым новую систему с надеждой с ее помощью прибыть в целевую точку (Y*,T*), хотя бы и по другой траектории Y* (1) (t) (см.Рис.28). Такое управление и называется управлением по структуре. Можно различать случаи, когда новая структура создается только из частей (возможно, не всех) старой системы (например,хирургическая операция, смена схемы административного подчинения, сброс балласта с воздушного шара или подводной лодки, и т.п.), и случаи вовлечения в структуру новых элементов извне (пристройка к зданию, протезирование, расширение штатов и пр.). Такому разнообразию отвечает множественность названий для данного типа управления: реорганизация, перестройка, модернизация, самоорганизация и т.п.
Возможности управления по структуре тоже ограничены: новые структуры можно создавать только из имеющегося (и всегда ограниченного) материала. Если окажется, что никакая перестройка старой системы не позволит достичь цели (Y*,T*), остается сменить цель (например, отодвинуть срок до T** или снизить уровень притязаний до Y**, (см.Рис.29). Это и есть управление по целям.
Можно различать цtли недостижимые в принципе; недостижимые, но достойные стремления и допускающие приближения к ним (идеалы); недостижимые в заданных условиях; недостигнутые из-за неэффективного управления. Однако, определить, с каким именно из вариантов мы столкнулись в конкретном случае, не всегда просто.
МАТЕРИАЛЬНЫЕ РЕСУРСЫ МОДЕЛИРОВАНИЯ
Эффективность управления зависит не только от информации. Представьте себе, что ваша модель адекватна, т.е. можно точно рассчитать поведение системы; однако результат рассчета вы получите намного позже того времени, когда необходимо осуществлять управление. Причина этого в том, что имеющиеся материальные ресурсы, вовлеченные в моделирование (например, объем памяти и быстродействие компьютера), недостаточны для своевременного отыскания управления u*(t). Это делает управление неэффективным, и цель - недостижимой.
БОЛЬШИЕ СИСТЕМЫ
Системы, для успешного моделирования которых нехватает материальных ресурсов (и, следовательно, времени), будем называть большими системами. Превратить большую систему в малую можно увеличив материальное обеспечение процесса моделирования. Примером является создание АСУ различных уровней.
О СВОЙСТВАХ СИСТЕМ
В нашем понимании сложность или простота системы есть ее свойство, зависящее от качества модели системы. Сложность модели есть следствие неадекватности модели. Одна и та же система может быть простой (для специалиста) и сложной (для незнающих ее).
Аналогично, является ли система большой или малой, зависит от обеспеченности моделирования материальными ресурсами (в отличие от информационных ресурсов в случае сложности).
Возможны все четыре варианта систем:
- малая и простая;
- малая и сложная;
- большая и простая;
- большая и сложная.
(Придумайте примеры из области своих интересов). Важно, что понятия этих свойств системы оказываются не атрибутами (собственными качествами) системы, а свернутым отношением между системой и ее моделью.
(Поразмышляйте, не являются ли любые свойства не атрибутами объектов - носителей свойств, а свернутыми отношениями данного объекта с другими объектами. Может быть, понятие свойства - лишь упрощенная модель многоместных отношений, позволяющая экономно мыслить о реальном мире?).
ЗАКЛЮЧЕНИЕ
Итак, вы ознакомились с минимумом методологических знаний из общесистемных теорий, который нужен для понимания описываемой в Части II технологии прикладного системного анализа. То, что изложено в Части I, позволит вам понять, почему необходимы именно те технические приемы, которые описываются дальше, и из которых конструируется любое конкретное системное исследование, организуется решение любой конкретной проблемы.
Наиболее важны для дальнейшего следующие моменты:
- усвоение системного видения мира;
- понимание значения моделей в любой деятельности человека и знание их особенностей;
- четкое различение систем и их моделей;
- понимание зависимости возможностей управления от качества моделирования;
- четкое понимание и различение предложенных понятий сложных и больших систем.
(Если эти формулировки кажутся вам неясными, советуем еще раз прочесть соответствующие разделы Части I: они написаны почти безызбыточно, и, возможно, при первом чтении что-то ускользнуло от вашего внимания.)

