 2015-06-04
2015-06-04 1799
1799Применение корректирующих устройств преследует две цели: 1) обеспечить требуемую точность системы; 2) получить приемлемый характер переходных процессов, т, е. качество регулирования.
Наиболее универсальным и эффективным методом повышения точности системы является увеличение общего коэффициента усиления. Это можно сделать за счет введения в систему дополнительных усилителей или повышения коэффициентов передачи отдельных звеньев системы (датчиков, редукторов и т, д.).
Однако при увеличении общего коэффициента усиления система приближается к границе устойчивости. При некотором предельном значении коэффициента усиления система может стать неустойчивой. Таким образом, корректирующие устройства должны не только увеличить коэффициент усиления системы, но и одновременно повысить запас ее устойчивости.
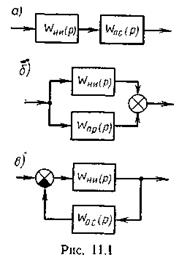
Корректирующие звенья могут вводиться в систему различными способами (рис. 11.1, а—в): а) последовательно; б) параллельно; в) в виде местной обратной связи.
На рисунке Wни(p) - передаточная функция подлежащей коррекции неизменяемой части цепи регулирования; Wпс(p), Wпр (р), Wo.с (р) - передаточные функции соответствующих корректирующих звеньев. Передаточные функции скорректированных систем:
а) последовательная коррекция

б) параллельная коррекция

в) местная обратная связь
Использование корректирующих звеньев того или иного типа определяется удобством их технического осуществления.
Формулы перехода от одного типа корректирующего звена к другому:






Применение коррекции в виде местной обратной связи повышает стабильность характеристик системы. Когда  , в этом случае
, в этом случае  и характеристики системы практически не зависят от характеристик звеньев, охваченных обратной связью, а определяются в основном характеристиками корректирующего звена.
и характеристики системы практически не зависят от характеристик звеньев, охваченных обратной связью, а определяются в основном характеристиками корректирующего звена.








