 2015-06-05
2015-06-05 430
430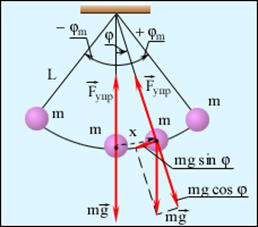
|
| Рис. 54. Математический маятник. φ – угловое отклонение маятника от положения равновесия, x = l φ – смещение маятника по дуге. |
Это точка массой m, подвешенная на невесомой нити, и колеблющейся под действием силы тяжести. Момент инерции J = ml2, (8.64).
где l - длина маятника. Поскольку математический маятник это частный случай физического маятника, когда вся масса сосредоточена в одной точке, то период его колебаний T = 2pÖl/g. (8.65).
РЕЗОНАНС.
Резкое возрастание амплитуды вынужденных колебаний при сближении частот вынуждающей силы и собственной называется резонансом. При d2 << w02 значение wрез. практически совпадает с собственной частотой w0 колебательной систе5ы.
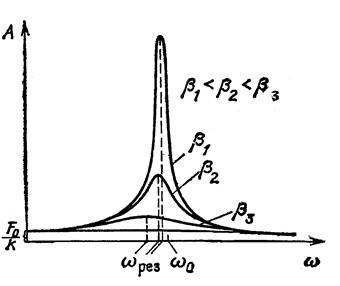
Рис. 55. Набор резонансных кривых.
И получим Aрез. = x0/2dÖw02 - d2. (8.66).
Амплитуда скорости
wAрез. = x0w/Ö(w02 - w2) +4d2w2 = x0/Ö(w02 - w2)/w2 + 4d2. (8.67).
максимальна при w = w0 и равна x0/(2d), т.е. чем больше коэффициент затухания d, тем ниже максимум резонансной кривой и амплитуда скорости при резонансе равна Aрез. = x0/(2d) = F/r. (8.68).
Изображенная на рисунке совокупность графиков функции называется резонансными кривыми. A/x = ω0/2β = 2π/2βT = π/λ = Q. (8.69).
где  -логарифмический декремент затухания. Явления резонанса могут быть как вредными, так и полезными. Например, при конструировании машин и различного рода сооружений необходимо, чтобы собственная частота колебаний их не совпадала с частотой возможных внешних воздействий, в противном случае возникнут вибрации, которые могут вызвать серьезные разрушения. С другой стороны, наличие резонанса позволяет обнаружить даже очень слабые колебания, если их частота совпадает с частотой собственных колебаний прибора.
-логарифмический декремент затухания. Явления резонанса могут быть как вредными, так и полезными. Например, при конструировании машин и различного рода сооружений необходимо, чтобы собственная частота колебаний их не совпадала с частотой возможных внешних воздействий, в противном случае возникнут вибрации, которые могут вызвать серьезные разрушения. С другой стороны, наличие резонанса позволяет обнаружить даже очень слабые колебания, если их частота совпадает с частотой собственных колебаний прибора.








