 2015-06-05
2015-06-05 7618
7618Автоматические радиопеленгаторы устанавливаются в районе аэродрома и определяют угол между северным направлением и направлением на самолет. Наземные пеленгаторы работают в диапазоне УКВ совместно с самолетной командной УКВ радиостанцией. В качестве оконечного устройства пеленгатор имеет стрелочный индикатор, шкала которого проградуирована в градусах, а ноль шкалы совпадает с направлением на север. Стрелка прибора показывает пеленг в момент, когда экипаж выходит на связь с диспетчером УВД, т.е. бортовая связная станция работает на излучение. Необходимость использования наземных пеленгаторов заключается в следующем. Диспетчер УВД наблюдает за воздушной обстановкой в зоне ответственности с помощью наземного радиолокатора, на экране которого самолеты отображаются в виде ярких засветок. Если самолетов в зоне достаточно много, то диспетчеру трудно определить, с экипажем которого из них он ведет переговоры по радиосвязи. При этом сложно адресовать нужную команду нужному экипажу. В этих случаях диспетчером используется информация с наземных автоматических радиопеленгаторов. Во время переговоров по радио диспетчер определяет пеленг cамолета, с экипажем которого установлена связь, затем этот пеленг отсчитывается по шкале индикатора РЛС и тем самым определяется засветка от нужного самолета. Возможно совмещение информации от автоматического радиопеленгатора с радиолокационным изображением. В настоящее время в гражданской авиации применяются современные автоматические пеленгаторы, имеющие несколько независимых частотных каналов (АРП-75, АРП-80). Их работа достаточно сложна для пояснения в рамках настоящего пособия.
Для эффективного УВД диспетчер наземной службы УВД должен иметь достаточный объем информации о ВС, находящихся в зоне его ответственности. Наиболее важной является информация о координатах ВС. Получение такой информации на земле обеспечивается с помощью наземных радиолокационных систем, которые позволяют получать также данные о метеообстановке.
По принципу получения информации об объекте все радиолокационные системы делятся на две группы:
радиолокационные системы, использующие эффект частичного отражения целью энергии падающей волны (первичная радиолокация);
радиолокационные системы, которые предполагают использование ответчиков, установленных на борту ВС. Этот вид радиолокации еще называется вторичной радиолокацией (ВРЛ).
Необходимо отметить, что ряд современных первичных радиолокационных систем имеют в своем составе встроенные каналы, работающие на принципах вторичной радиолокации. Такое техническое решение позволяет объединить положительные свойства первичных и вторичных РЛС. Первые обладают высоким уровнем автономности при получении информации о самолетах, вторые имеют более высокий уровень помехозащищенности, большую дальность действия, более высокий уровень достоверности получаемой информации, а также возможность получения дополнительной информации о ВС.
С помощью радиолокационной системы измеряют координаты ВС в полярной системе координат с полюсом в точке установки РЛС – наклонную дальность от ВС и его азимут. ДНА РЛС в горизонтальной плоскости достаточно узкая, что необходимо для измерения азимута. В вертикальной плоскости ДНА РЛС имеет специальную сложную форму (рис.6.1).
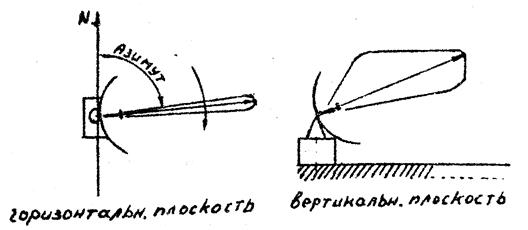
Рис. 6.1. ДНА обзорной РЛС
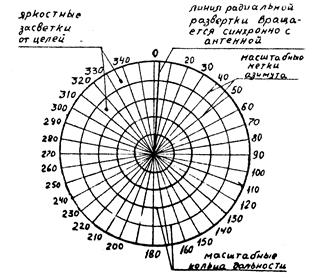
Рис. 6.2. Индикатор кругового обзора РЛС
Индикатор кругового обзора наземной РЛС имеет вид, показанный на рис. 6.2.
Линия развертки на экране РЛС вращается синхронно с вращением антенны. Одновременно на экране формируется масштабная сетка для измерения азимута и дальности цели. При облучении цели на входе приемника появляются отраженные от нее сигналы, которые усиливаются, поступают на индикатор и отображаются в виде яркой точки. Оператор с помощью масштабной сетки определяет ее азимут и дальность.
Потребителями радиолокационной информации являются диспетчеры УВД. Каждый диспетчер имеет свою зону ответственности в соответствии со структурой ВП.
С относительно недавнего времени радиолокационные позиции (РЛП) систем УВД ГА стали оснащаться моноимпульсными вторичными радиолокаторами (МВРЛ). Дело в том, что радиолокаторы с однолепестковой ДНА (имеется в виду главный лепесток) даже теоретически по одному отраженному (или излученному) импульсу от точечного даже неподвижного объекта не могут определить его угловое положение точнее, чем в пределах ширины ДНА; угловое положение объекта определяется по середине дужки отметок от пачки импульсов, получающейся при вращении антенны. Не анализируя возможные при этом ошибки, укажем лишь, что они возрастают, если сам объект движется (особенно азимутально).
В МВРЛ прием сигналов осуществляется двумя одинаковыми антеннами, работающими каждая на свой канал. Обе антенны смонтированы рядом в одном антенном блоке так, что направления максимумов их ДН развернуты на небольшой угол, образуя симметричную «вилку» относительно некоторого равносигнального направления. Если цель находится на равносигнальном направлении, сигналы в обоих каланах будут одинаковыми по амплитудам и фазам, - антенный блок точно наведен на цель. Если цель не находится на равносигнальном направлении, сигналы в каналах будут разными. Но по их различиям при соответствующей обработке решающим устройством может быть вычислено отклонение цели от равносигнального направления антенного блока (пусть даже неподвижного), то есть найдено истинное угловое положение цели теоретически даже по одному импульсу. Практически для достоверного воспроизведения отметки даже неподвижной цели необходимо несколько импульсов.
Моноимпульсная радиолокация предъявляет повышенные требования к стабильности частоты сигнала и к электромагнитным параметрам радиотехнических устройств.








