 2015-06-05
2015-06-05 1057
1057Твердое тело называется свободным, если оно может перемещаться в пространстве в любом направлении.
Твердое тело называется несвободным, если перемещения его в пространстве ограничены. Тела, ограничивающие движение других тел, называются связями.
Сила, выражающая механическое действие связи на тело, называется реакцией связи.
Принцип освобождаемости — несвободное твердое тело можно рассматривать как свободное, если освободить его от связей и заменить их реакциями связей.
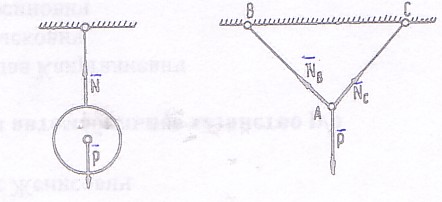
Направление реакций связи. Реакция нити направлена вдоль нити (рис.2.1).
Рисунок 2.1 Рисунок2.2
Реакции свободных опор направлены перпендикулярно опорной поверхности (рис.2.2).
Если два тела соединены болтом, проходящим через отверстия в этих телах, то такое соединение называется шарнирным. Осевая линия болта называется осью шарнира. Шарнир называется идеальным, если отсутствует трение в месте соприкосновения тел. Реакции идеальных шарниров, соединяющих невесомый и абсолютно твердый стержень с другими телами, направлены вдоль стержня, если нагрузка к нему приложена только в узлах связей (рис. 2.4, а).
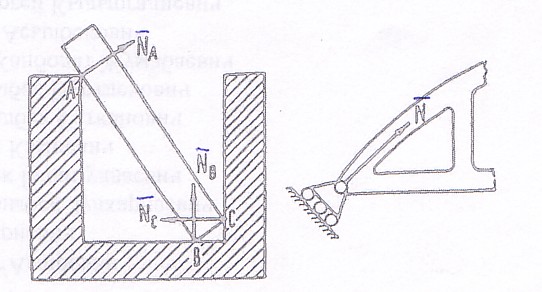
Рисунок 2.3
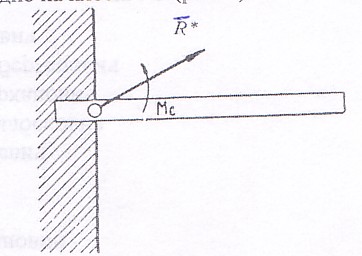
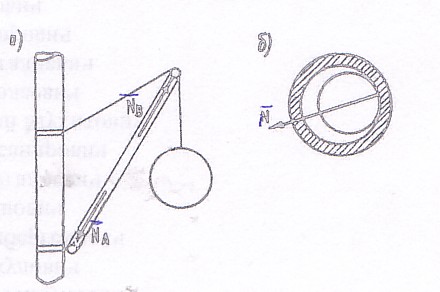
Рисунок 2.4 Рисунок 2.5
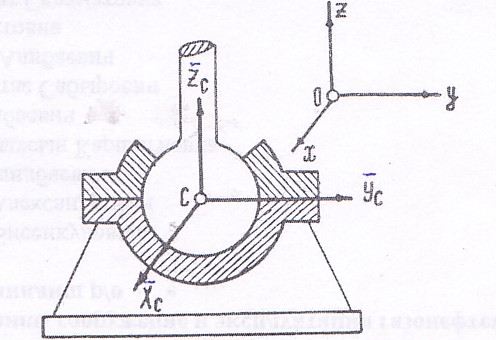 Рисунок 2.6
Рисунок 2.6
Реакция подшипника или цилиндрического шарнира лежит в плоскости, перпендикулярной оси шарнира, и при отсутствии трения пересекает ось шарнира (рис. 2.4, б). Неизвестную реакцию подшипника или шарнира заменяют двумя неизвестными ее составляющими по осям координат.
Реакция неподвижной жесткой заделки равна по величине и противоположна по направлению к главному вектору  и главному моменту
и главному моменту  , к которым приводятся силы, расположенные как угодно на плоскости (рис. 2.3).
, к которым приводятся силы, расположенные как угодно на плоскости (рис. 2.3).
Реакция сферического шарнира (рис. 2.5) проходит через его центр, если трение в шарнире пренебрежимо мало. Направление
Задача об упрощении произвольной плоской системы сил решается с помощью следующих теорем.
Теорема о параллельном переносе силы (метод Пуансо). Заданную силу  , приложенную в точке О тела, можно, не изменяя ее действия, перенести параллельно в любую другую точку тела (например, сила / в точке О/), добавляя при этом пару сил с моментом
, приложенную в точке О тела, можно, не изменяя ее действия, перенести параллельно в любую другую точку тела (например, сила / в точке О/), добавляя при этом пару сил с моментом 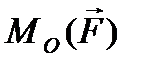 , равным моменту силы относительно новой точки приведения О/ (рис. 3.1).
, равным моменту силы относительно новой точки приведения О/ (рис. 3.1).
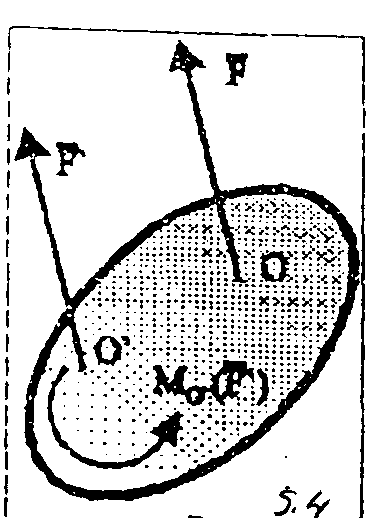
Рисунок 2.7 Рисунок 2.8
Любая плоская система сил  (рис. 2.8, б) одной силой
(рис. 2.8, б) одной силой  , называемой главным вектором системы сил и приложенной в центре О, и одной парой сил с моментом Мо, называемым главным моментом системы сил относительно центра О:
, называемой главным вектором системы сил и приложенной в центре О, и одной парой сил с моментом Мо, называемым главным моментом системы сил относительно центра О:  .
.
О - точка приведения (рис. 2.9). Из определения главного момента следует, что его можно вычислить так (п. 3.2):  .
.
Замечания. 1). В данном случае главный вектор не всегда является равнодействующей системы сил. 2). Главный вектор не зависит (является векторным инвариантом), а главный момент Мо зависит от положения центра приведения О.
Чтобы система сходящихся сил была уравновешенной, необходимо и достаточно, чтобы их геометрическая сумма  , являющаяся в данном случае равнодействующей, равнялась нулю: =0. Это означает, что силовой многоугольник должен быть замкнут (на рис. 2.7 – начало О первого вектора
, являющаяся в данном случае равнодействующей, равнялась нулю: =0. Это означает, что силовой многоугольник должен быть замкнут (на рис. 2.7 – начало О первого вектора  и конец последнего вектора
и конец последнего вектора  должны совпадать) – геометрическое условие равновесия системы сходящихся сил. Его удобно использовать при графическом решении задач.
должны совпадать) – геометрическое условие равновесия системы сходящихся сил. Его удобно использовать при графическом решении задач.
Аналитические условия (уравнения) системы сходящихсясил (индекс суммирования I опущен):  .
.
Для плоской системы сходящихся сил из этих трех уравнений останутся два, например:
 .
.
При решении задач иногда удобно использовать теорему о трех силах: если свободное твердое тело находится в равновесии под действием трех непараллельных сил, лежащих в одной плоскости, то линии действия этих сил пересекаются в одной точке (точка О на рис. 2.9)
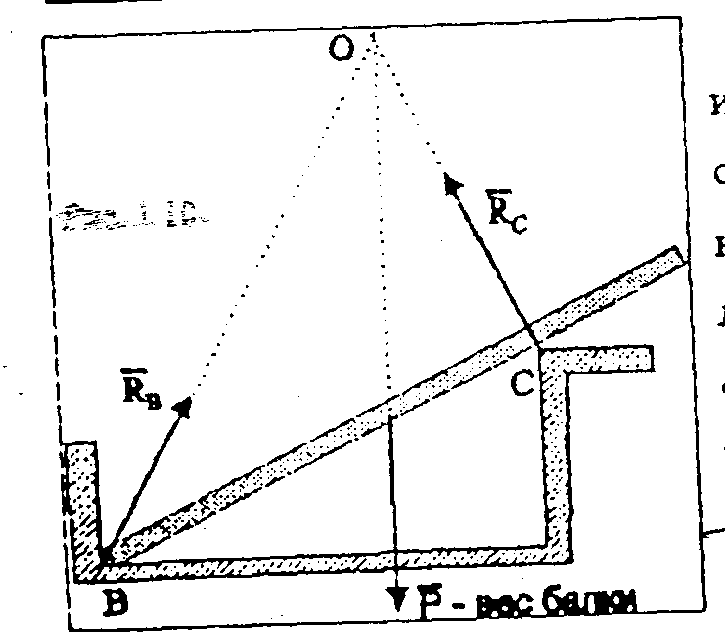
Рисунок 2.9
Литература: Яблонский А.А., Никифорова В.А.Курс теоретической механики.ч.1,2: Учебник. М., 1984. /1/Глава 3. §13-18 Глава 4. §19-25
Вопросы для самопроверки и задания:
1. Что такое – реакция связи?
2. В чем состоит принцип освобождаемости от связей?
3. Основные виды опор – каковы их названия, какого типа реакции им соответствуют?
4. Из каких составляющих складывается реакция шероховатой поверхности?
5. От чего зависит и чему равна максимальная сила трения скольжения?
6. Что определяет величину коэффициента трения скольжения?
7. Что называют проекцией силы на ось?
8. Что называют проекцией силы на плоскость?
9. Что является мерой механического взаимодействия тел?
10. Какие три фактора характеризуют действие силы на твердое тело?
11. Какого рода объект можно назвать абсолютно твердым телом?
12. Что такое – система сил, какие две системы сил называют эквивалентными?
13. Какую силу называют равнодействующей некоторой системы сил?
14. Силы действия и противодействия равны по величине, действуют по одной прямой и направлены в противоположные стороны. Можно ли считать, что такое действие уравновешено противодействием?

