 2015-06-28
2015-06-28 387
3871) Із формул (3.5) і (3.6) знаходимо М = 
2) Користуючись таблицею 2 виберемо значення  для електронного тахеометра Та 5,
для електронного тахеометра Та 5,
яке дорівнює 20 мм.
Підставляючи значення в ліву та праву частини виразу 20 мм 
202 мм х 12 = 4800мм2 
 4800мм2 27848мм2
4800мм2 27848мм2
3.4. Розрахунок точності кутових вимірювань та величин окремих джерел похибок.
Очікувану с.к.п. виміру кута  обчислюють із відношення, яке отримане на основі принципу рівних впливів:
обчислюють із відношення, яке отримане на основі принципу рівних впливів:
для зігнутого ходу
для видовженого ходу
де Дці — віддаль від точки з номером і до центра ваги ходу, координати якого визначаються як середнє арифметичне з усіх точок ходу, я саме
Віддаль Дці може бути знайдена як
 .
.
Величину Дці можна знайти графічним способом. На карту або на папір в масштабі наносять хідя, який запроектовано хід (рис.3.1). Спочатку визначають центр ваги ходу. Для цього першу сторону ходу ділять наполовину, отриману точку а з’єднують з наступною точкою ходу, а отриману лінію ділять на три частини, відмічають точку в, яка віддалена від а на 1/3 лінії, потім точку в з’єднують з наступною точкою ходу і т.д. до кінцевої точки ходу. Після знаходження центру ваги значення Дці знаходять безпосередньо на схемі ходу з графічною точністю.
Потім обчислюють величини Дці, а з їх допомогою  , які сумують і знаходять
, які сумують і знаходять  . Цю величину підставляють у формулу , звідки знаходять спочатку М 2, а потім М.
. Цю величину підставляють у формулу , звідки знаходять спочатку М 2, а потім М.
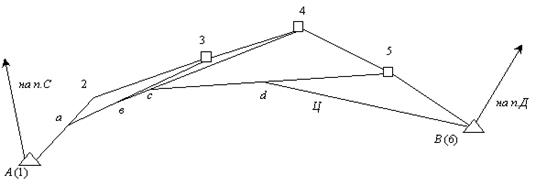
Мал. 3.1. Визначення центру ваги полігонометричного ходу
графічним способом
За найденою величиною вибирають прилад та метод кутових вимірювань. Типи теодолітів, які застосовуються для полігонометрії 4 класу, 1 та 2 розрядів, а також методи вимірювання кутів вказані в таблиці 3.
таблиця 3.
╔═══════════════════════════════════════════════╗
║ Основні техничні характеристики теодолітів. ║
╠═══════════════════════════════╤═══════╤═══════╣
║ │ 3Т2КП │ 3Т5КП ║
╟───────────────────────────────┼───────┼───────╢
║ Середня квадратична помилка │ │ ║
║ вимірювання горизонтального │ 2 │ 4.5 ║
║ кута, с │ │ ║
╟───────────────────────────────┼───────┼───────╢
║ збільшення зорової труби, │ 30 │ 30 ║
║ крат │ │ ║
╟───────────────────────────────┼───────┼───────╢
║ Наименьша відстань для │ 1.5 │ 1.5 ║
║ візування, м │ │ ║
╟───────────────────────────────┼───────┼───────╢
║ Диаметри кругів, мм │ 90 │ 90 ║
╟───────────────────────────────┼───────┼───────╢
║ Цена ділення шкали відлікового│ 1 │ 60 ║
║ пристрою, с │ │ ║
╟───────────────────────────────┼───────┼───────╢
║ Цена деления рівня на алідаді │ 15 │ 30 ║
║ горизонтального круга, с │ │ ║
╟───────────────────────────────┼───────┼───────╢
║ Цена ділення круглого рівня, │ 5 │ 5 ║
║ хв. дуги │ │ ║
╟───────────────────────────────┼───────┼───────╢
║ Диапазон роботи компенсатора, │ 3.5 │ 4 ║
║ хв │ │ ║
╟───────────────────────────────┼───────┼───────╢
║ Маса теодолита, кг │ 4.7 │ 4.2 ║
╚═══════════════════════════════╧═══════╧═══════╝
В запроектованому ході повинно витримуватись відношення

де  - середня квадратична похибка вимірювання кута теодолітом (точність приладу).
- середня квадратична похибка вимірювання кута теодолітом (точність приладу).
Приклад.4. В запроектованому вигнутому полігонометричному ході 4 класу дов-жиною 3950 метрів розрахувати с.к.п. вимірювання кута, якщо величина М рівна 0.079 м. Величини Дці визначені графічнимшляхом із схеми (рис.3.1), наведено в таблиці 4
таблиця 4
╔══════════════════════╗
║ Визначення [Dцi] ║
╠════╤══════╤══════════
║ NN │Dцi, м│ D2 цi, м ║
╠════╪══════╪══════════╣
║ 1 │ 1800 │ 3240000 ║
║ 2 │ 1300 │ 1690000 ║
║ 3 │ 1025 │ 1050625
║ 4 │ 950 │ 902500 ║
║ 5 │ 1300 │ 1690000 ║
║ 6 │ 1825 │ 3330625 ║
╠════╧══════╪══════════╣
║ [Dцi] │ 11903750 ║
╚═══════════╧══════════╝
Рішення. Із виразу знайдемо величину
 0.079
0.079  206265
206265  =3,3”.
=3,3”.
Відповідно, для вимірювання кутів необхідно використовувати теодоліти типу Т2, 2Т2, 3Т2КП.
Якщо величина буде менше , тоді в середині ходу необхідно запроектувати або визначення астрономічного азимуту, або визначення дирекційного кута шляхом короткого кутомірного ходу до найближчого твердого пункту. В такому випадку розрахункові формули , приймуть наступний вигляд:
для вигнутого ходу

для видовженого ходу
де k - число секцій ходу. Для випадку одного проміжкового азимута або дирекційного кута k=2.
Для вигнутого ходу в кожній секції знаходять відповідний центр ваги і визначають  .
.
Розрахунок величин впливу окремих джерел помилок при кутових вимірюваннях виконують, виходячи із того, що величина характеризує сумісний вплив ряду джерел помилок на результати вимірювання, а саме: редукція і центрування, інструментальних, особисто вимірювання і зовнішніх умов. Помилки вихідних даних не враховуються. Відповідно,

Звідси, застосувавши принцип рівних впливів, отримаємо
 на основі даного співвідношення розрахуємо встановлення візирної марки і теодоліта над центрами знаків.
на основі даного співвідношення розрахуємо встановлення візирної марки і теодоліта над центрами знаків.
С.к.п. редукції і центрування виражаються формулами

Де e1 - лінійний елемент редукції,
е2 - лінійний елемент центрування,
s – середня довжина сторони полігонометричного ходу.
Вважаючи, що  обчислюють e1 і е2 за формулами
обчислюють e1 і е2 за формулами

Приклад.5. Розрахувати точність центрування вів зірної марки і теодоліта за даними, отриманими в прикладі 4.
Підставляючи значення в формулу , отримаємо с.к.п. редукції і центрування
За формулами
знайдемо е1 і е2
е1 = 
 мм,
мм,
е2 =  мм.
мм.
Відповідно, візирну марку і теодоліт необхідно центрувати з допомогою оптичного центриру.
Число прийомів при вимірюванні кутів способами кругових прийомів або окремих кутів визначають за формулою
Де  відповідно с.к.п. вимірювання кута, візування, відліку,
відповідно с.к.п. вимірювання кута, візування, відліку,
 - число прийомів.
- число прийомів.
Гадаючи,що








