2015-06-26
2015-06-26 2275
2275· С.Н.С. называются системы, для которых неизвестные силы (опор-
-ные реакции, внутренние силы) невозможно определить из уравнений
статического равновесия.
· Число неизвестных системы, превышающее число независимых ура-
-внений статики для данной системы, называется степенью статичес-
-кой неопределимости.
* Связи представляют собой ограничения, наложенные на перемеще-
-ния точек системы. Необходимые связи обеспечивают неподвижность
системы. Реакции этих связей определяются из уравнений статического
равновесия. При этом система будет статически определимой. Дополни-
-тельные, связи наложенные на систему, с точки зрения статики будут
избыточными и система при их наложении станет статически неопре-
-делимой. Если обозначить общее число связей «С» число необходи-
-мых связей «Н», а число избыточных (лишних) связей «Л» получим оче-
-видное уравнение:
Л= С – Н.
При этом «Л» представляет собой степень статической неопределимо-
-сти; степень статической неопределимости равна числу лишних свя-
- зей.
* Раскрытие статической неопределимости можно трактовать как опре-
-деление реакций или внутренних сил соответствующих лишним свя-
-зям. Решение задачи начинается с выбора основной системы.
* Основной системой называется статически определимая система
образованная из заданной статической неопределимой системы путем
отбрасывания лишних связей. Следует заметить, что основная система
может быть выбрана различными способами, так как выбор лишних
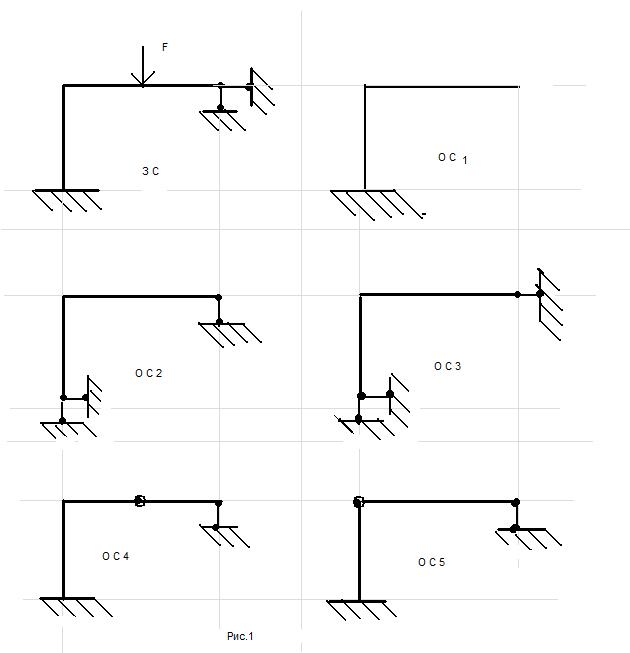
связей из общего числа связей является произвольным. Так для приве-
-денной рамы общее число связей С=5, необходимое число связей Н=3, откуда следует, что число лишних (отброшенных) связей будет
Л = 5 – 3 = 2. При этом система 2 раза статически неопределима.
Различные варианты основных систем для заданной рамы приведены
на рис. 1.
Выбираем первый вариант основной системы (О С на рис.2). Изображаем
эквивалентную систему (ЭС), которая представляет собой основную систему, к которой приложены заданные нагрузки и реакции лишних связей (рис. 2). Если мы определим неизвестные силы Х1 и Х2 то рассматриваемая система окажется эквивалентной заданной в силовом и
деформационном смысле. При этом перемещение шарнира К при совмест-
ном действии сил F, Х1 и Х2 в горизонтальном и вертикальном направлениях должны быть равны нулю. Наша задача, таким образом, со-
стоит в том чтобы определить неизвестные силы из условия совместно-
-сти деформаций. Этот метод раскрытия статической неопределимости
называется метод сил. Запишем эти условия в виде системы уравнений:
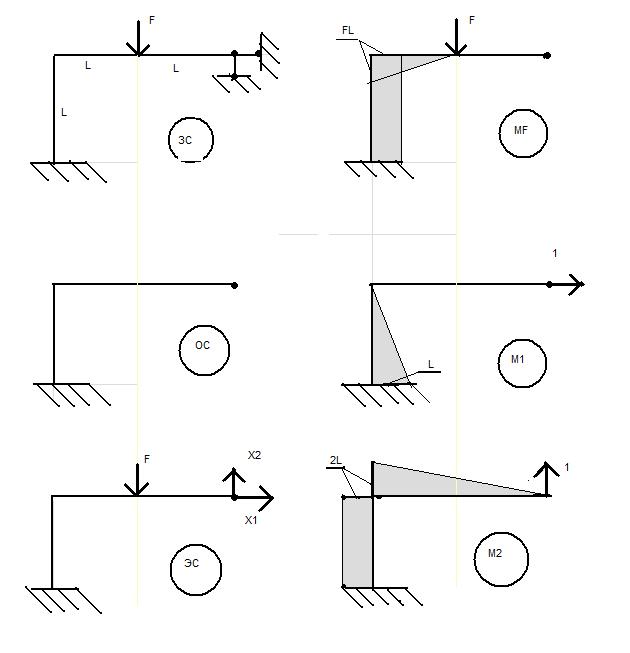
Рис. 2.
Д1(Х1) + Д1(X2) + Д1(F) = 0 (1)
Д2(Х1) + Д2(Х2) + Д2(F) = 0
Для определения перемещений способом Мора – Верещагина построим
эпюры от действия на основную систему заданных нагрузок “MF” и
единичных сил, действующих в направлении Х1 и Х2, соответственно
(они названы на рис.2 «М1» и «М2»). Перемещения в уравнениях (1)
определяются путем «перемножения» эпюр условно обозначенному значком «!»:
Д1(F) = М1! МF; Д2(F) = M2! MF
Д1(Х1) =(М1! М1)* Х1; Д1(Х2) = (М1! М2)* Х2;
Д2(Х1) =(М2! М1)* Х1; Д2(Х2) = (М2! М2)* Х2;
Введем обозначения:
M1! M1 = Д11; М1! М 2 = Д12; М1! МF = Д1F;
М2! М1 = Д21; М2! М2 = Д22; М2! МF = Д2F.
Тогда система уравнений (1) запишется, как система линейных ура-
-нений относительно неизвестных сил Х1 и Х2.
Д11* Х1 + Д12* Х2 = - Д1F (2)
Д21* Х1 + Д22* Х2 = - Д2F
В результате перемножения эпюр получим такую систему уравнений:
(L**3/3)*X1 - (L**3)*X2 = -1/2*(F*L**3) (3)
(- L**3)*X1 + (20/3*L**3)*X2 =17/ 6*(F*L**3).
В реультате решения системы уравнений (3) получим:
Х1 = - (9/ 22) *F; X2 = (4/ 11)*F.
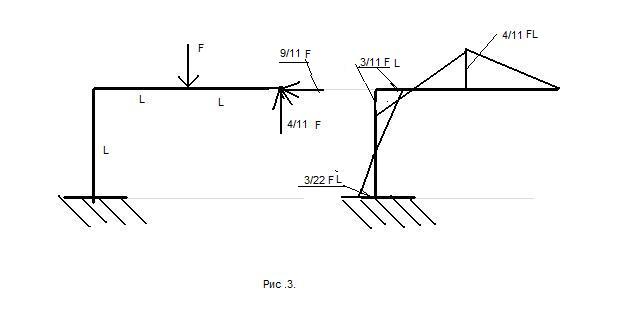
Окончательная эпюра моментов приведена на рис.3.
Введем некоторые пояснения. Коэффициенты в системе (2) с одинаковыми
Индексами Д jj называются главными и всегда положительны. Коэффи-
-циенты с различными индексами Дij (I /=J) наз. побочными коэффици-
-ентами, причем Дij = Дji, cогласно теореме о взаимности перемещений.
Для «n» раз статически неопределимой системы систему уравнений (2)
можно представить в матричной форме:
[ Д ij ] * [ X ] = - [ Gf ],
где [ Д ij ] – матрица перемещений от действия единичных сил (n*n);
[ X ] - вектор неизвестных сил (n*1);
[ Gf ] – вектор грузовых членов (n*1).
Заметим что матрица [ Д ij ] является квадратной и симметричной.
Пример 1. Рассмотрим балку, защемленную с левого торца и с шар - -нирной опорой под правым торцем (рис.4). Такая балка имеет четыре
общих связей при необходимых трех и является 1 раз статически не-
-определимой. В качестве основной системы можно принять систему с
отброшенной шарнирной опорой при сохранении защемления. Эквива-
лентную систему получим путем приложения к основной системе задан-
-ной нагрузки Х вместо отброшенной связи. Далее строим эпюры МF и
М1 -- от действия на основную систему заданной нагрузки и единичной
силы вместо Х, соответственно, взятых отдельно. Система уравнений мето-
да сил (3) будет в данном сллучае представлена одним уравнением:
Д11* Х1 = - Д1F.
Д11 = М1! М1 = (½ * 2L * 2L)*(4/ 3 * L) = 8/3 * L**3; Д1F =М 1!МF= 1/3*(1/2* qL**2*L)*(3/4*L) +1/2*qL**2*L*(3/2*L) +1/2*qL**2*L*(5/3*L)= =41/24*qL**4;
X1 = - Д1F/ Д11 = - 41/64 *qL.
Окончательные эпюры Qy и Мх строятся при совместном действии «q»
и «Х1», при этом Х1 направлена вверх.
Пример 2 Рассмотрим балку, закрепленную к основанию с помощью трех
шарнирных опор: одной шарнирно-неподвижной и двух шарнирно-под-
-вижных(рис.5). Система, по аналогии с примером 1, является 1 раз статически неопределимой. Основную систему получим из заданной путем отбрасывания правой опоры. Ниже представлены эквивалентная система и системы «частных состояний» MF и М1. В результате перемножения эпюр получим следующие перемещения.
Д11 = 2*[ ½*(2L*2L)*(4/3*L)] = 16/3*L**3; Д1F = - 2/3*(1/2*qL**2)*2L*(L) + ½*qL**2L*(4/3*L) + ½*qL**2*2L*(7/4) =
= 7/24 qL**4.
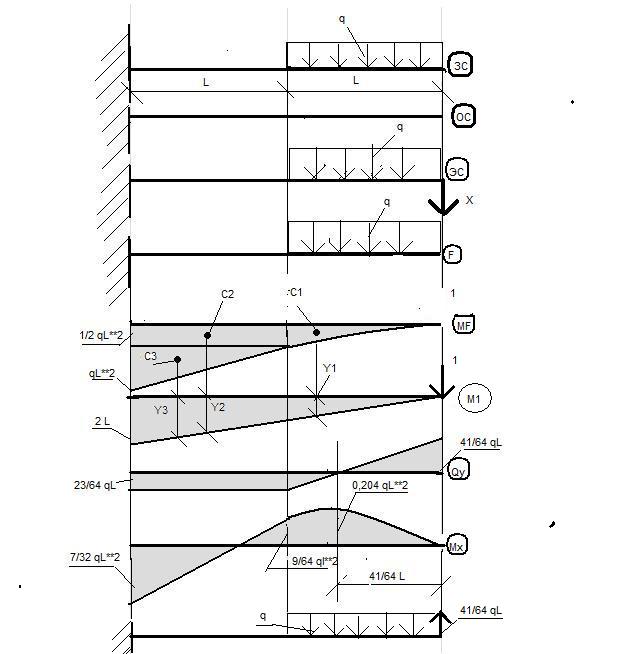
Рис.4
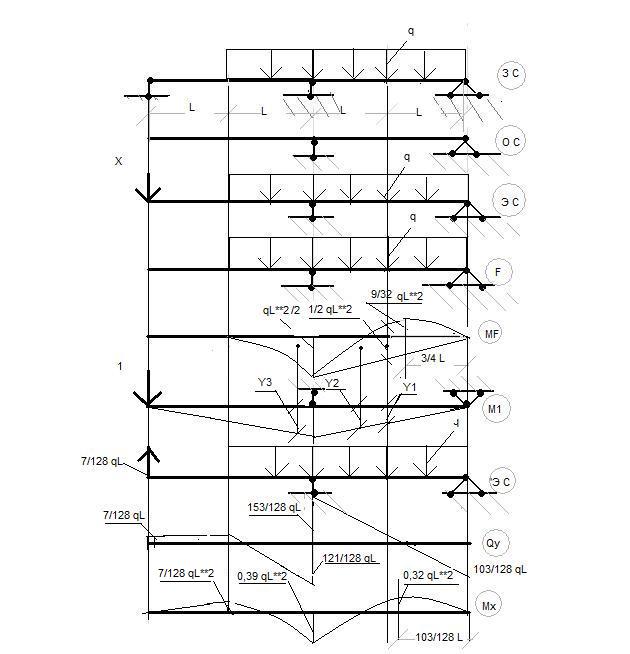
Рис.5.
Неизвестная сила будет:
Х = - Д1F/Д11 = - 7/128*qL.
Две нижние позиции отведены под окончательные эпюрю Qy и Мх.
Примечание: при перемножении эпюр М1 и МF разбиваем эпюру МF на
параболический сегмент, треугольник и параболический треугольник.
Определение перемещений Для определения перемещений в статичес-
-ки неопределимых системах следует перемножить окончательную эпюру
на эпюру полученную от приложения единичной силы к основной си-
-стеме в том сечении и в том направлении где требуется определить
перемещение. Пусть требуется определить угол поворота правого торца
0 к. Строим эпюру М1* от приложения единичного момента к основной
системе (Рис. 6). Причем выбор основной системы может быть произвольным, поэтому вариант О.С. следует выбрать оптимальным с точки зрения перемножения эпюр (здесь О.С. другая). В результате перемножения эпюры Мх на эпюру, приведенную на рис 6, получим:
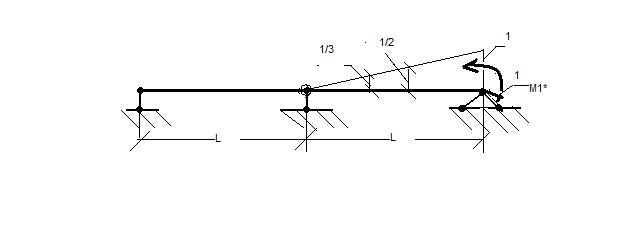
Рис.6.
EJx* Ɵ = 2/3*qL**2*(1/2) – 0,39*1/2*qL**2*(1/3) = 0,265 qL**3.
Пример 3. Статически неопределимая рама.
Приведенная рама (рис. 7 а) имеет четыре связи при трех необходимых
и поэтому будет 1 раз статически неопределимой. Основную систему
образуем путем отбрасывания верхней шарнирно- подвижной опоры.
Изображаем эквивалентную систему и строим эпюры от действия еди-
-ничной силы М1 и от действия нагрузок МF на основную систему.
Уравнение метода сил запишем в виде:
Д11* Х = -- Д1f.
Перемещение Д1f определим с использованием метода перемножения
трапеций (рис. 7 б – внизу) по следующему алгоритму.
Д = L/6*(a*(2c +d) + b*(c + 2d));
Д1f =1/2*(1/2*2FL*L)*(2/3*L)+2L/6*(2FL*(-2L+L)- FL*(-L+2L)) = - 5/3*FL**3
Д11 = 4*(1/2*L*L)*(2/3*L) = 4/3*FL**3
Неизвестная сила будет
Х = - (- 5/3*FL**3)/(4/3*FL**3) = 5/4*F
После приложения в эквивалентной системе определенной реакции вместо Х и определения остальных опорных реакций (с помощью уравнений статического равновесия), строим окончательную эпюру Мх.
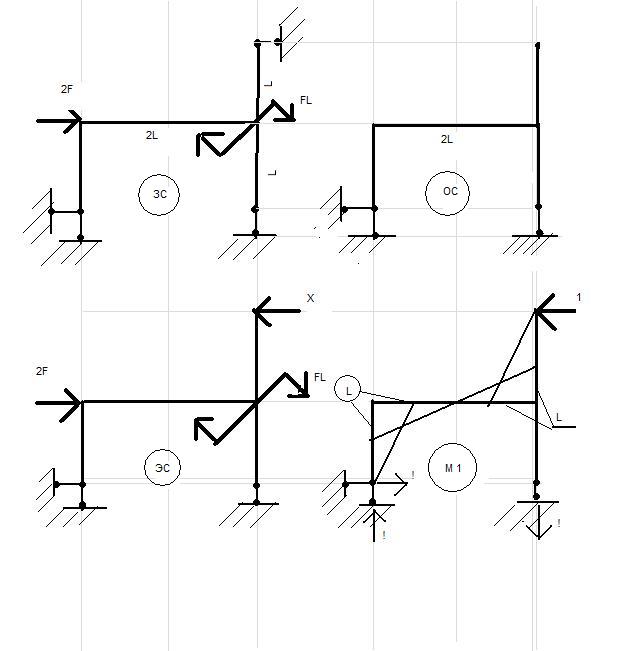
Рис. 7а
Проверка решения. Предлагаемый способ проверки, предложенный В.Л.
Кирпичевым, основан на том, что перемещение в направлении отброшен-
-ной связи отсутствует, откуда Мx*Mi =0. В нашем случае
Мx*M1 = -1/2*(3/4*FL*L)*(2/3*L) + 2L/6*(3/4*FL*(-2L+L) +1/4*L*(- L+2L)) +
+1/2*(5/4*FL*(2/3*L)) = 0.
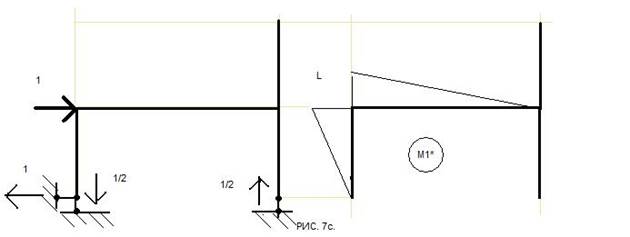
Определим горизонтальное перемещение сечения К. Для этого строим
Эпюру моментов М1^ от нагружения основной системы единичной силой, приложенной в заданном сечении (Рис.7с). Искомое перемещение будет:
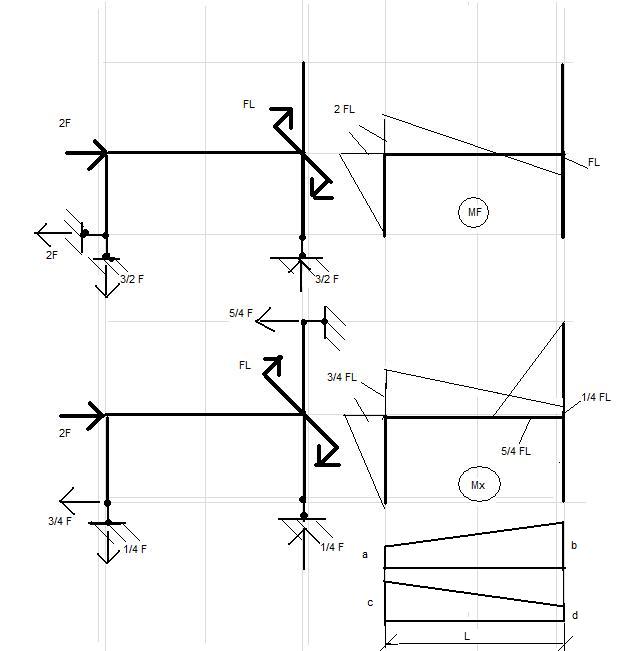
Рис. 7 б.
ЕJx*Vh =(M1^)*Mx =1/2*(3/4*FL*L)*(2/3*L) +2L/6*(3/4*FL*2L+ +¼*FL*L)=7/12*FL**3.