 2015-07-04
2015-07-04 276
2761. Ввести структурные схемы линейной и нелинейной САУ 2-го порядка (рисунок 4.8).
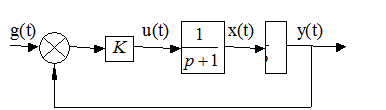
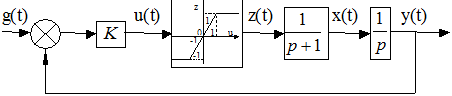
Рисунок 4.8
2. Коэффициент усиления К пропорционального регулятора установить равным К=0.525.
3. Построить форму выходных сигналов y(t) на выходах линейной и нелинейной систем при уровне задающего ступенчатого воздействия g(t)=1,10,100 в каждом случае на одном графике для обеих систем. Построить зависимости времени регулирования от величины задающего воздействия tрег=f(g).
4. Зарисовать фазовую траекторию САУ в координатах (х,у) для каждого из трех рассмотренных выше случаев.
5. Ввести структурные схемы линейной и нелинейной САУ 3-го порядка (рисунок 4.9).
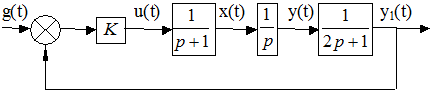

Рисунок 4.9
6. Построить на одном графике форму выходных сигналов y1(t) на выходах линейной и нелинейной систем при уровне задающего ступенчатого воздействия g(t)=10.
7. Построить на одном графике выходные сигналы (форму автоколебаний) систем при значении коэффициента усиления пропорционального регулятора К=5.25 при g(t) ® 0. Измерить амплитуду и частоту автоколебаний в нелинейной системе. Исследовать влияние на них значения K.
8. Ввести структурную схему САУ 2-го порядка с нелинейностью типа "гистерезис" (рисунок 4.10).
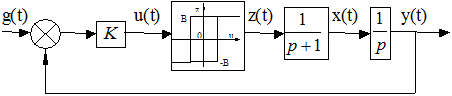
Рисунок 4.10
8. Зарисовать форму автоколебаний (K=5.25) на выходе системы при B=1. Снять зависимость амплитуды А и частоты w этих автоколебаний при B=0.1,1,10,100. Построить графики зависимостей функций от параметра В — ширины петли гистерезиса: A = f1(B), w = f2(B). Исследовать влияние коэффициента усиления K.








