 2015-07-02
2015-07-02 3957
39575.6.1. Описание механизма
Механизм предназначен для горизонтального перемещения стрелы шагающего экскаватора с ковшом (см. рис. 5.13).
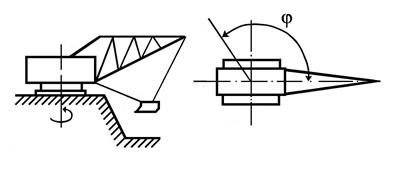
Рис. 5.13
Цикл работы механизма состоит из следующих этапов.
Ковш набирает породу, в это время привод поворота платформы не работает. Затем происходит поворот платформы на некоторый угол j, который зависит от конкретных условий отработки забоя. Обычно в качестве расчетного угла поворота принимается j = 120°. Высыпание породы из ковша начинается еще до полной остановки привода поворота, поэтому отдельной паузы для опорожнения ковша нет, сразу после торможения начинается разгон в обратную сторону.
Пауза (t 0) для забора грунта определяется особенностями грунта и составляет 8 – 20 с. Обычно считают, что отработка полного цикла с углом 120° должна занимать 60 с.
Примерный вид тахограммы и нагрузочной диаграммы показан на рис. 5.14.
Следует заметить, что из-за больших пространственно-распределенных масс и наличия ковша на гибкой подвеске для данного привода важным является требование ограничения рывка. Это требование реализуется ограничением темпа изменения момента двигателей на уровне 1 – 1,5 номинала в секунду, что видно на рис. 5.14.
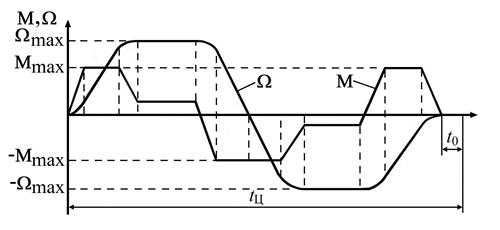
Рис. 5.14
Привод поворота платформы всегда выполняется по многодвигательному варианту с числом двигателей от 4 до 8. При этом существуют два варианта построения таких приводов: безредукторный (рис. 5.15 а) и редукторный (рис. 5.15 б)
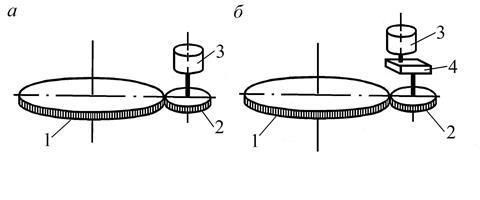
Рис. 5.15
На рис. 5.15 обозначено: 1 – венцовая шестерня, связанная с поворачиваемой частью экскаватора; 2 – ведущая шестерня; 3 – электродвигатель; 4 – редуктор.
5.6.2. Варианты конструктивно-технологических параметров
Основные данные экскаваторов приведены в табл. 5.7.
Таблица 5.7ччччч
| Данные механизма | Обозна-чение | Размер-ность | Тип экскаватора | ||||||
| ЭШ 15.90А | ЭШ 20.90 | ЭШ 25.100 | ЭШ 40.85 | ЭШ 65.100 | ЭШ 100.100 | ЭШ 100.120 | |||
| Максимальная скорость поворота платформы | W max | 1/с | 0,123 | 0,126 | 0,127 | 0,127 | 0,128 | 0,129 | 0,129 |
| Максимальное ускорение платформы | e max | 1/с2 | 0,025 | 0,025 | 0,025 | 0.022 | 0,022 | 0,022 | 0,022 |
| Момент сопротивления | МСРМ | Н·м | 6,36·105 | 7,95·105 | 1,20·106 | 1,37·106 | 2,70·106 | 3,70·106 | 3,90·106 |
| Момент инерции с полным ковшом | J РМ1 | кг·м2 | 5,60·108 | 7,72-108 | 8,37·108 | 1,20·109 | 3,00·109 | 5,42·109 | 7,55·109 |
| Момент инерции с пустым ковшом | J РМ2 | кг·м2 | 4,80·108 | 6,43·108 | 7,57·108 | 0,92·109 | 2,40·109 | 4,66·109 | 6,32·109 |
| Передаточное число венцового зацепления | i ВЗ | – | 16,8 | 16,8 | 28,8 | ||||
| Количество двигателей | N | – |
 Примечания: 1. Значения МСРМ, J РМ1, J РМ2 приведены к оси центральной цапфы – оси вращения венцовой шестерни.
Примечания: 1. Значения МСРМ, J РМ1, J РМ2 приведены к оси центральной цапфы – оси вращения венцовой шестерни.
 2. Моменты инерции даны для положения ковша на 2/3 вылета стрелы.
2. Моменты инерции даны для положения ковша на 2/3 вылета стрелы.
Варианты выполнения электрических схем силовых цепей показаны на рис. 5.16.
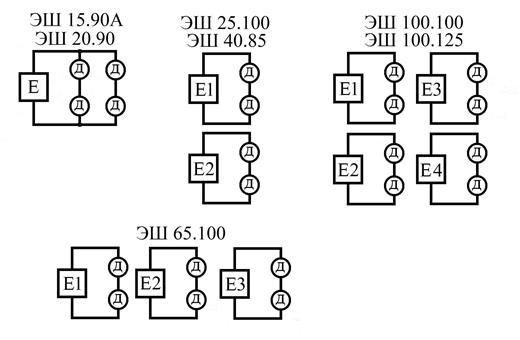
Рис. 5.16:
Е – источник питания; Д – двигатель
5.6.3. Требования к электроприводу
Требования к электроприводу следующие:
– диапазон регулирования скорости не менее 10:1;
– режим работы повторно-кратковременный;
– привод должен быть реверсивным и обеспечивать рекуперацию энергии при торможении;
– необходимость ограничения рывка за счет ограничения  в пределах 1,0 – 1,5 ном/с;
в пределах 1,0 – 1,5 ном/с;
– необходимость ограничения максимального ускорения платформы при разгоне и торможении и максимальной скорости поворота платформы.
В таком приводе, как поворот платформы шагающего экскаватора, большое значение имеет учет влияния упругих колебаний на поведение системы. При достаточно подробном рассмотрении данный привод представляет собой многозвенную систему с распределенными параметрами, расчет коэффициентов жесткости которой достаточно сложен. В табл. 5.8 приведены коэффициенты жесткости С 12для упрощенного представления системы как двухмассовой, приближенно рассчитанные по экспериментально определенным частотам собственных колебаний f 12 (данные НИИТяжмаш ПО "Уралмаш").
Таблица 5.8
| Тип экскаватора | С 12, Н·м/рад | f l2, Гц |
| ЭШ 15.90А (редукторный вариант) | 10,25·109 | 3,65 |
| ЭШ 20.90 (редукторный вариант) | 10,76 109 | 6,48 |
| ЭШ 20.90 (безредукторный вариант) | 13,5·109 | 9,8 |
| ЭШ 25.100 (безредукторный вариант) | 28,8·109 | 9,18 |
| ЭШ 80.100 (безредукторный привод) | 2,11·1011 | 10,28 |
Примечание. Величина С 12 в табл. 5.8 приведена к оси центральной цапфы.
Как видно из табл. 5.8, для редукторных вариантов жесткость и частота собственных колебаний ниже, чем для безредукторных.
5.6.4. Указания к выбору и проверке электродвигателя
В приводах поворота платформы экскаватора приведенный к валу двигателя момент инерции механизма всегда много больше, чем момент инерции самого двигателя (коэффициент соотношения масс g порядка нескольких сотен). Это дает возможность весьма точно выбирать двигатель, пользуясь нагрузочной диаграммой M(t), которая построена с учетом только момента инерции механизма.
Обычно пуск и торможение этого привода происходит "под отсечку". Это значит, что максимальные моменты при пуске и торможении можно принимать одинаковыми MП = MT = Mmax, где Mmax рассчитывается исходя из заданного ускорения платформы при моменте инерции, соответствующем порожнему ковшу,
Mmax = J РМ1emax + Мсрм.
Таблица 5.9ьььь
| Параметры | Обозна-чение | Размер-ность | Тип электродвигателя | |||||
| ПЭВ 143-7КЭ | МПВЭ 400-32 | МПВ7 400-400 | МПВЭ 450-29 | МПС 640-700 | МПВ 1000-32 | |||
| Мощность | PN | кВт | ||||||
| Частота вращения | nN | об/мин | ||||||
| Напряжение якоря | U Я N | В | ||||||
| Ток якоря | I Я N | А | ||||||
| Напряжение возбуждения | U В N | В | ||||||
| Ток возбуждения | I В N | А | 17,8 | |||||
| Сопротивление якоря | R Я | Ом | 0,0 062 | 0,0 223 | 0,0 112 | 0,015 | 0,00 735 | 0,0 088 |
| Сопротивление обмотки добавочных полюсов | R ДП | Ом | 0,00 119 | 0,0 184 | 0,003 | 0,0 058 | 0,002 | 0,0 045 |
| Сопротивление компенсационной обмотки | R КО | Ом | 0,00 345 | – | 0,0 051 | 0,0 116 | 0,00 532 | 0,0 034 |
| Сопротивление обмотки возбуждения | R В | Ом | 3,88 | 3,0 | 7,16 | 2,36 | 9,16 | 1,56 |
| Число параллельных ветвей ОВ | m В | – | ||||||
| Число витков на полюс | W B | – | ||||||
| Число пар полюсов | p | – | ||||||
| Поток на один полюс | Ф N | Вб | 0,90 | 0,235 | 0,17 | 0,314 | 0,165 | 0,575 |
| Момент инерции якоря | J Д | кг·м2 | 32,25 | |||||
| КПД | hN | % | 90,0 | 84,0 | 92,4 | 83,3 | 94,3 | 85,8 |

Примечание. Все сопротивления даны для температуры 15 ° С.
После построения нагрузочной диаграммы рассчитывается среднеквадратичный момент за время цикла t Ц
На участках нагрузочной диаграммы, где М = const, в формулу для MСР.КВ можно подставить M i 2 ti. Но на участках, где момент нарастает или снижается, в формулу MСР.КВ необходимо подставлять интеграл
где D t – длительность нарастания или снижения момента (см. рис. 5.14).
В первом случае М = МНАЧ + m t, а во втором М = МНАЧ – m t, где  – заданный темп изменения момента. Не трудно установить, что в обоих случаях интеграл J определяется по формуле
– заданный темп изменения момента. Не трудно установить, что в обоих случаях интеграл J определяется по формуле
По MСР.КВ и заданной скорости поворота платформы определяется требуемая мощность двигателя.
В приводах шагающих экскаваторов применяются специальные двигатели, их данные приведены в табл. 5.9.








