 2015-07-04
2015-07-04 797
797Рассмотрим нелинейную следящую систему, описанную в разд. 2.4, в которой исполнительным устройством является электрический двигатель, а регулятор представляет собой идеальное реле (рис. 2.14).
Пусть, например, передаточная функция замкнутого контура скорости
 ,
,
где Т = 0,14 с; x = 0,707; K = 3,75.
Регулятор (идеальное реле) характеризуется параметром с = 10.
После очевидных преобразований передаточная функция замкнутой системы
 ,
,
а характеристическое уравнение

или
 ,
,
где a 3 = T 2 = 0,142 = 0,0196;
a 2 = 2 xT = 2 × 0,707 × 0,14 = 0,198;
a 1 = 1;
a 0 = K × q = 3,75 × q.
Для возникновения автоколебаний, как уже указывалось, необходимо наличие чисто мнимого корня p = jw
 .
.
Действительная и мнимая части
 ;
;
 .
.
Из уравнения V (w) = 0 может быть определена частота автоколебаний
 с-1.
с-1.
Период колебаний
 с.
с.
Теперь из уравнения U (w) = 0 с учетом w = wа можно определить амплитуду автоколебаний
 .
.
Для обоснования справедливости применения метода гармонической линеаризации необходимо проверить гипотезу фильтра. Для этого найдем значения АЧХ линейной части системы на частотах wа и 2 wа (вторая гармоника).
АЧХ линейной части можно представить в виде
 ,
,
где А 1(w) и А 2(w) – АЧХ колебательного и интегрирующего звеньев
 .
.
После подстановки численных значений параметров получим А (wа) = 0,32, А (2 wа) = 0,058. Так как А (2 wа) << А (wа), можно считать, что ЛЧ практически не пропускает высшие гармоники и, таким образом, является фильтром нижних частот, а применение метода гармонической линеаризации справедливо.
Для проверки найденного периодического режима на устойчивость применим к характеристическому уравнению критерий устойчивости Гурвица. Для системы третьего порядка при положительности всех коэффициентов условие устойчивости сводится к выполнению неравенства
 , (2.14)
, (2.14)
которое при A (t) = А 0 должно принять вид равенства
 .
.
Подставив  в уравнение U (w) = 0, получим
в уравнение U (w) = 0, получим
или
 . (2.15)
. (2.15)
Левая часть неравенства (2.14) отличается от выражения (2.15) только значением a 0 = K × q, так как в первом случае коэффициент гармонической линеаризации  , а во втором –
, а во втором –  .
.
При A (t) = A 0 неравенство (2.14) обращается в равенство.
При A (t) > A 0 неравенство (2.14) выполняется, и величина A (t), уменьшаясь, стремиться к A 0.
При A (t) < A 0 неравенство (2.14) не выполняется, величина A (t) возрастает, стремясь к A 0 и оставаясь меньше ее. Следовательно, найденное решение устойчиво, и в системе наблюдаются автоколебания.
Оценить значение a, обеспечивающего А 0 < Азад можно из характеристического уравнения системы с учетом дополнительной обратной связи по производной. При этом  ;
;  . Для рассматриваемого случая wа = 21,97 с-1; a = 0,089.
. Для рассматриваемого случая wа = 21,97 с-1; a = 0,089.
Модель АСУ в Simulink приведена на рис. 2.24. В ней предусмотрена возможность введения обратной связи по производной. При a = 0 эта связь отсутствует.
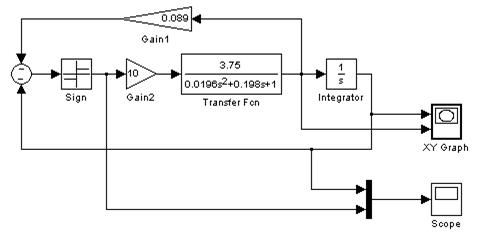
Рис. 2.24. Схема моделирования скользящего режима в Simulink
На рис. 2.25, а представлены графики переходного процесса для выходной переменной j (t) и переключения реле z (t), из которых видно, что амплитуда и частота автоколебаний совпадает с расчетными. На фазовой плоскости (рис. 2.25, б) фазовые траектории сходятся к замкнутому устойчивому предельному циклу, определяющему параметры автоколебаний.
| |||
| |||
 а) |
 б) |
Рис. 2.25. Результаты моделирования скользящего режима в НС без обратной связи по производной: а) график переходного процесса; б) фазовая траектория
При введении обратной связи по производной картина изменяется (см. рис. 2.26). Амплитуда колебаний уменьшается и в пределе при t ® ¥ стремится к нулю, а частота колебаний увеличивается.
|
|
 а) |
 б) |
Рис. 2.26. Результаты моделирования скользящего режима в НС с обратной связью по производной: а) график переходного процесса; б) фазовая траектория








