 2015-07-14
2015-07-14 1921
1921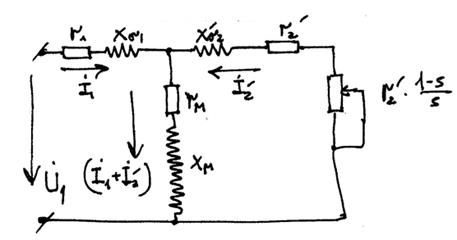
1).  активное сопротивление обмотки статора:
активное сопротивление обмотки статора:
– зависит от температуры: 
– для крупных АМ зависит от частоты (вытеснение тока)- ограничивают площадь сечения
проводов.
2).  ,
,  – индуктивные сопротивления рассеяния (рассчитываются примерно одинаково).
– индуктивные сопротивления рассеяния (рассчитываются примерно одинаково).

где  индуктивное сопротивление пазового рассеяния
индуктивное сопротивление пазового рассеяния
 индуктивное сопротивление лобового рассеяния
индуктивное сопротивление лобового рассеяния
 индуктивное сопротивление дифференциального рассеяния
индуктивное сопротивление дифференциального рассеяния
Причина возникновения диф.рассеяния – дискретность распределения обмотки, неравномерность воздушного зазора.
3).  активное сопротивление ротора.
активное сопротивление ротора.
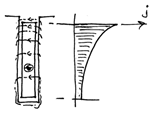
При большой частоте (в начале пуска) из-за б о льшего индуктивного сопротивления элементарных проводников, расположенных у дна паза, ток вытесняется в верхнюю часть паза, уменьшая тем самым эффективное сечение стержня.
 В курсе ТОЭ эта задача решалась аналитически (решение Эмде):
В курсе ТОЭ эта задача решалась аналитически (решение Эмде):
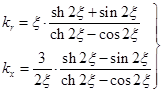 где
где 
 действительная высота стержня,
действительная высота стержня,
 приведенная глубина проникновения поля в массив проводника:
приведенная глубина проникновения поля в массив проводника: 
Это явление эффективно используется для повышения пускового момента и снижения пускового тока в так называемых глубокопазных АМ (АД).
4).  активное сопротивление, эквивалентирующее потери в стали.
активное сопротивление, эквивалентирующее потери в стали.
5).  самое большое сопротивление в схеме замещения. Определяется величиной воздушного зазора
самое большое сопротивление в схеме замещения. Определяется величиной воздушного зазора  .
.
В АМ, в отличие от трансформаторов, намагничивающий ток достаточно велик:

где  для крупных машин
для крупных машин  для малых машин
для малых машин
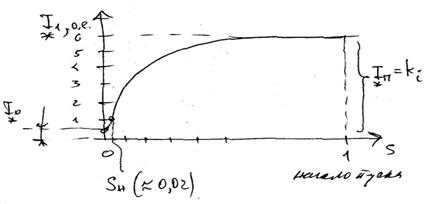
Соответственно, отличается и векторная диаграмма АМ – б о льшим намагничивающим током.
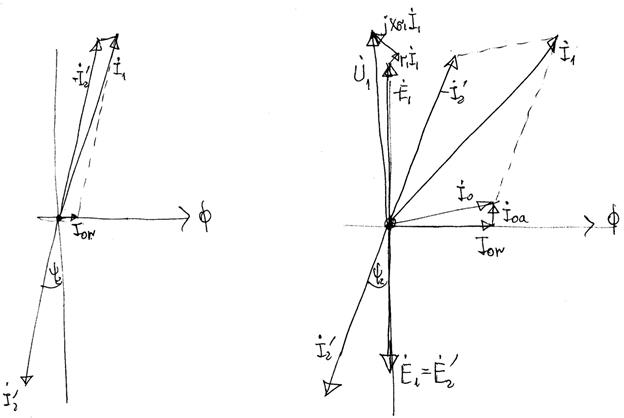
Векторная диаграмма АМ при Векторная диаграмма АМ
активно-индуктивной нагрузке, в режиме двигателя.
 .
.
I. Выражения параметров асинхронного двигателя в относительных единицах
Схема замещения представляет одну фазу машины. На входе ее- фазные напряжения и фазный ток. Базовое сопротивление:  (Ом).Удобно выразить все параметры схемы замещения в относительных единицах- в долях базового сопротивления:
(Ом).Удобно выразить все параметры схемы замещения в относительных единицах- в долях базового сопротивления:  ;
;  ; … Удобство состоит в том, что для нормальных машин относительные значения параметров остаются примерно постоянными в довольно широком диапазоне мощностей.
; … Удобство состоит в том, что для нормальных машин относительные значения параметров остаются примерно постоянными в довольно широком диапазоне мощностей.
Итак, основная проблема - определение параметров и их зависимостей от данных режима.
Зависимости: От скольжения зависят токи статора и ротора.
Изменение тока в процессе пуска 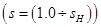 . где
. где  кратность пускового тока.
кратность пускового тока.
 насыщение коронок зубцов
насыщение коронок зубцов  уменьшение проводимости пазового рассеяния уменьшение
уменьшение проводимости пазового рассеяния уменьшение  .
.
Аналогично: 
Кроме того, из-за влияния вытеснения тока при больших скольжениях:

Определение зависимостей параметров машины от данных режима (от скольжения) - довольно трудная задача. В последнее время для решения этой задачи часто применяются численные методы расчета полей. В частности, современные программы, реализующие метод конечных элементов (в том числе FEMM), позволяют рассчитывать поля (а значит, и параметры) с учетом насыщения стали и вытеснения тока в массивных проводниках.








