 2015-07-14
2015-07-14 4672
4672Механизмы могут быть плоскими и пространственными. Они могут быть разделены также намеханизмы с низшими и с высшими кинематическими парами.
Механизмы, звенья которых образуют только низшие (вращательные, поступательные, цилиндрические, сферические) кинематические пары, называются шарнирно-рычажными. Эти механизмы нашли широкое применение в машиностроении в следствии того, что при взаимодействии звеньев усилия в кинематических парах распределяются по поверхности. Благодаря этому удельные давления в этих парах и износ их элементов ниже. Основой для многих плоских механизмов служит шарнирный четырехзвенник.
Оси кинематических пар в этом механизме выполнены перпендикулярно к плоскостям,вкоторых находятся траектории точек звеньев.
Механизм предназначен для преобразования одного вида вращательного движения в другое. В зависимостиот размеров звеньев шарнирный четырехзвенник (рис.2.12.)может быть:
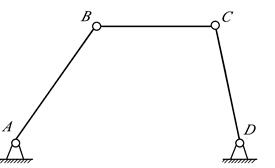
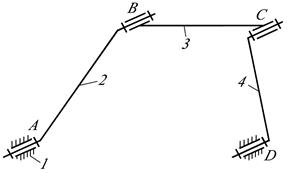
Рис.2.12.
- двухкоромысловым;
- кривошипно-коромысловым;
- двухкривошипным.
Для четырехшарнирного механизма условие существования указанных механизмов сформулировано в правиле (теореме) Грасгофа:
Если сумма длин наибольшего и наименьшего звеньев меньше суммы длин двух остальных звеньев и стойкой является наименьшее звено, то механизм – двухкривошипный. Если неравенство выполняется, но стойкой является звено, соединенное с наименьшим, то механизм – кривошипно-коромысловый. Во всех остальных случаях механизм – двухкоромысловый.
 Набазе шарнирного четырехзвенникапостроен к ривошипно-ползунный механизм, служащий для преобразования вращательного движения в возвратно-поступательное или, наоборот, возвратно-поступательного во вращательное. Этот механизм основной вовсех поршневых машинах (двигатели внутреннего сгорания, компрессоры, насосы и т.д.).
Набазе шарнирного четырехзвенникапостроен к ривошипно-ползунный механизм, служащий для преобразования вращательного движения в возвратно-поступательное или, наоборот, возвратно-поступательного во вращательное. Этот механизм основной вовсех поршневых машинах (двигатели внутреннего сгорания, компрессоры, насосы и т.д.).
Для кривошипно-ползунного механизма условие существования кривошипа: длина кривошипа ( l1 ) должна быть меньше разности длины шатуна ( l2 ) и величины дезаксиала ( e ). Если это условие не выполняется, то механизм – коро
Рис. 2.13 мыслово-ползунный.
Одной из разновидностей шарнирного четырехзвенника является кривошипно-кулисный (или просто кулисный) механизм. Он служит для преобразования вращательного движенияво вращательное или в возвратно-поступательное.
Кулиса — звено рычажного механизма, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном (кулисным камнем) поступательную пару (рис.2.13).
Кулису конструктивно выполняют в виде направляющей детали 1, охватывающей другую деталь и имеющей большую (сх. а) или малую (сх. б) длину по сравнению с длиной охватываемой детали. Кулиса может также охватываться сопряженной с ней деталью 2 (сх. в).
Соответственно конструктивным решениям используют различные обозначения кулисного механизма. (сх. г—и)
Сх. г, д, е эквивалентны сх. а, сх. ж, з эквивалентны сх. б, сх. и эквивалентна сх. в. Обозначения в схемах: 1 — кулиса; 2 — движущееся относительно нее звено.
В сх. д кулиса выполнена в виде цилиндра, а звено 2 — в виде штока с поршнем.
В сх. е звено 2 соединено с кулисой 1двухподвижной парой.
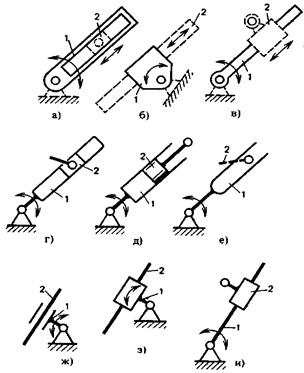
Кулисно-ползунный механизм (рис.2.14.) - рычажный четырехзвенный механизм, содержащий кулису и ползун с неподвижной направляющей.
Кулисно-ползунный механизм служит для преобразования качательного движения кулисы 1 в поступательное движение ползуна 3 или, наоборот, поступательного движения ползуна в качательное движение кулисы.
Кулиса 1 и ползун 3 взаимодействуют посредством шатуна 2, связанного с кулисой поступательной парой, а с ползуном 3 — вращательной парой.
Примеры шарнирно-рычажных механизмов, используемых в технических устройствах железнодорожного транспорта рассмотрены в следующем разделе.
Рис.2.14.
Одним из примеров пространственного механизма является карданная передача или шарнир Гука (механизм универсального шарнира) (рис.2.15.).
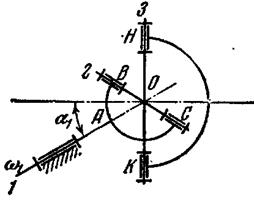
Рис. 2.15.
Широко распространенным пространственным механизмом с низшими кинематическими парами является винтовой механизм, служащий для преобразования вращательного движения в поступательное.
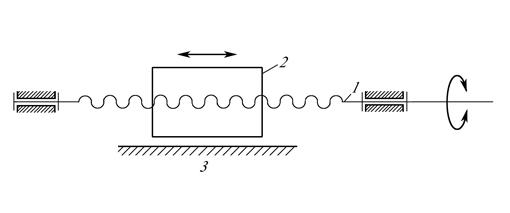
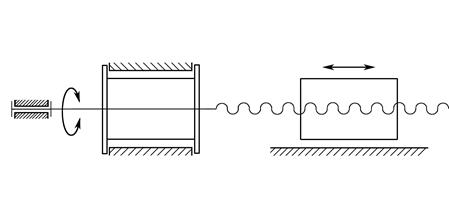
Рис. 2.16.
К механизмам свысшими кинематическими парами относятся зубчатые, фрикционные, кулачковые механизмы. В этих механизмах подвижные звенья образуют со стойкой низшие кинематические пары 5 класса, а между собой – высшие кинематические пары 4 класса.
Плоскими зубчатыми механизмами являются механизмы с цилиндрическими зубчатыми колесами (например, тяговая зубчатая передача локомотива, зубчатая передача механизма опережения впрыска топлива (рис.2.24а)).
К пространственным зубчатым механизмам относятся механизмы с коническими зубчатыми колесами (например, в механизме опережения впрыска топлива (рис.2.24 б), в механизме привода вентилятора тягового генератора локомотива, в редукторе тягового генератора пассажирского вагона), механизмы с винтовыми зубчатыми колесами, червячные механизмы.
Вопросы для самоконтроля:
1. Какой механизм называется плоским?
2. Какой механизм называется пространственным?
3. Какой механизм называется шарнирно-рычажным?
4. В чем заключается правило Грасгофа?
5. Для чего предназначен четырехшарнирный механизм?
6. Для чего служит кривошипно-ползунный механизм?
7. Назовите условие существования кривошипа для кривошипно-ползунного механизма.
8. Какой механизм называется кривошипно-кулисным? Для чего он предназначен?
9. Какое звено механизма называется кулисой?
10. Кикие механизмы относятся к механизмам с высшими кинематическими парами?








