 2015-07-14
2015-07-14 2363
2363В эвольвентном зацеплении боковая поверхность зуба описывается эвольвентой.
Эвольвента (латинское еvо1vеns - развертывающий) — кривая, геометрическим местом центров кривизны которой является другая кривая, называемая эволютой. Касательные к эволюте являются нормалями к эвольвенте (на рис.6.14 а а1О  А1К1, А1К1 tt). Длина дуги К0А1 (рис.6.14.а) равна отрезку нормали К1А1. Эвольвента может быть построена обкатыванием по эволюте без скольжения прямой, касательной к эволюте. Отрезок прямой
А1К1, А1К1 tt). Длина дуги К0А1 (рис.6.14.а) равна отрезку нормали К1А1. Эвольвента может быть построена обкатыванием по эволюте без скольжения прямой, касательной к эволюте. Отрезок прямой  равен радиусу кривизны эвольвенты. Точка К1 описывает эвольвенту. Если взять точку, расположенную вне этой прямой, но жестко связанную с ней, то эта точка опишет удлиненную эвольвенту (рис.6.14 б) или укороченную эвольвенту (рис.6.14 в).
равен радиусу кривизны эвольвенты. Точка К1 описывает эвольвенту. Если взять точку, расположенную вне этой прямой, но жестко связанную с ней, то эта точка опишет удлиненную эвольвенту (рис.6.14 б) или укороченную эвольвенту (рис.6.14 в).
На рис.6.14б с прямой А1К1 жестко связана прямая L1К1. Второе положение этой прямой обозначено L2К2. Точка L2 расположена на расстоянии a от прямой А2K2. Точка L1 описывает удлиненную эвольвенту при обкатывании прямой по эволюте.
На рис.6.14 в точке W1 жестко связана с прямой А1К1 и расположена на расстоянии а от нее, причем при перекатывании прямой А1К1 по эволюте точка W1 описывает укороченную эвольвенту, которая всегда находится вне эволюты.
Эвольвенту используют, в частности, в качестве контура зубьев в зубчатых передачах.
При этом эволютой для круглых колес является окружность радиусом rb, и эвольвенту называют эвольвентой окружности.
В соответствии с определением и свойствами эвольвенты ее можно представить в аналитическом виде.
Точка К1 на эвольвенте окружности (рис.6.14 а) характеризуется параметрами: радиусом r = ОК1 и углом β.
Уравнения эвольвенты представляют в виде зависимостей этих параметров от радиуса r и угла  .
.
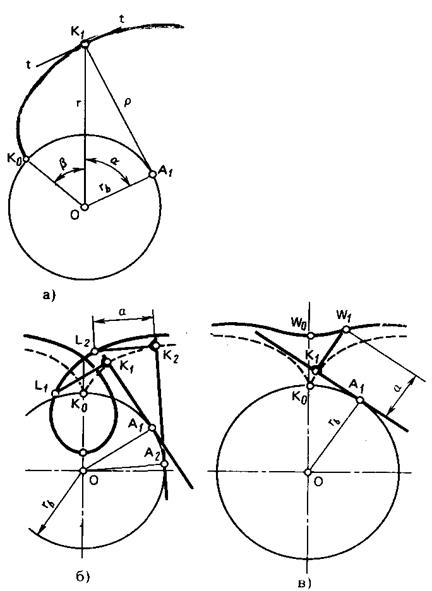
Рис.6.14
Из свойства эвольвенты следует


и в соответствии с этим
rb tg  = rb( + β)
= rb( + β)
Следовательно, 
β= tg - ,
а из треугольника К1А1О r = rb/cos .
Величину tg - , называют эвольвентным углом профиля зуба и обозначают inv (инвалюта ). С учетом этого уравнения эвольвенты имеют вид:
Окружность радиуса rb называют основной окружностью.
Так как нормаль к эвольвенте всегда касается основной окружности, то общая нормаль NN к сопряженным профилям касается обеих основных окружностей в т. А и В (рис.6.15).
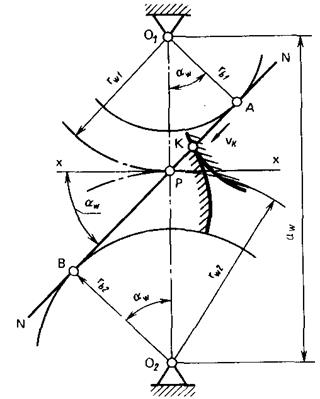
Рис.6.15
Эта же нормаль в соответствии с основной теоремой зацепления проходит через полюс Р. Очевидно, что эта нормаль при вращении круглых колес сохраняет неизменным свое положение. При ведущем колесе с центром О1 и вращении его по часовой стрелке точка контакта К перемещается в направлении vk по линии АВ, которая представляет собой линию зацепления. Таким образом, в эвольвентном зацеплении имеет место прямая линия зацепления.
Угол между линией зацепления и перпендикуляром xx к линии центров О1О2 называется углом зацепления и обозначается w. Он равен углам АО1Р и ВО2Р. Угол зацепления равен углу давления в полюсе зацепления и характеризует направление силы, действующей со стороны одного колеса на другое.
Начальные и основные радиусы связаны зависимостями:
Поэтому для внешнего эвольвентного зацепления

означает, что передаточное отношение однозначно определяется отношением основных радиусов. В связи с этим, если, например, при неизменных rb1 и rb2 изменить межосевое расстояние aw, то изменятся радиусы rw1 и rw2 и угол aw, а i 12 останется тем же. Это свойство эвольвентного зацепления свидетельствует о том, что при погрешностях расположения осей с сохранением их параллельности передаточное отношение остается постоянным.
Графическое построение эвольвентного зацепления производится следующим образом (рис. 6.16). Пусть О1О2 - линия центров. Проводим начальные окружности. Через точкуих касания проводим линию зацепления под углом aw= 20° к общей касательной в полюсе зацепления.
Из О1и О2 опускаем перпендикуляры на линию зацепления - это есть радиусы основных окружностей
rb1= rw1cos aw; rb2=rw2 cos aw
Расстояние РК делим на равные части, откладывая отрезки и за т. К. Соединяем полученные точки с центром О2. В точках пересечения прямых К1O2,... КnО2, с основной окружностью проводим касательные. Расстояние от полюса зацепления до соответствующего радиуса по линии зацепления откладываем по касательной, перпендикулярной этому радиусу. Точки соединяем плавной кривой. Профиль проводится между окружностями выступов и впадин.
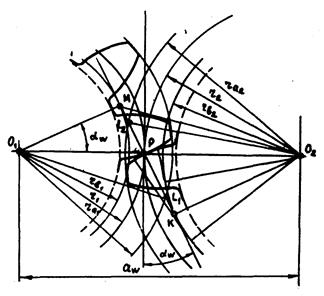
Рис. 6.16
Вторая сторона профиля строится симметрично, откладывая по начальной окружности s =1,57m
Точки а и b (рис.6.17) пересечения окружностей вершин зубьев с линией зацепления АВ определяют активную линию зацепления, т. е. ту часть линии зацепления, по которой при выбранных размерах зубьев перемещается точка контакта профилей зубьев.
. 
Рис.6.17 Рис.6.18
Активный участок профи ля зуба колеса 1 (отмечен двойной линией со штриховкой) располагается от вершины зуба до точки пересечения профиля с окружностью, проведенной из центра O1 через точку а.
Соответственно для колеса 2 надо провести окружность из центра O2 через точку b. Переходные (нерабочие) участки профиля скругляются у окружности впадин радиусом»0,4m, причем, если радиус основной окружности больше радиуса окружности впадин на величину, превышающую 0,4m, то дополнительно вводится участок, очерченный по радиусу к центру колеса. Переходные участки можно очерчивать и по другим кривым при соблюдении обязательного условия, что они не будут участвовать в зацеплении. Обычно эти кривые получаются при обработке профиля зуба как траектории точек инструмента в движении eгo относительно заготовки.

