 2015-07-14
2015-07-14 735
735Задача регулирования состоит в поддержании скорости движения при различных нагрузках на достаточно постоянном уровне. Это обеспечивается за счет регулирования движущей силы (движущего момента) с помощью различных регуляторов.
Регуляторами называются механизмы или приборы, предназначенные для автоматического поддержания непериодических колебаний угловой скорости вращения ведущих звеньев машин в заданных пределах. Непериодические колебания скорости возникают вследствие случайного изменения движущих сил или сил сопротивлений, действующих на звенья машин. Так, например, внезапное увеличение подачи энергии к двигателю вызывает повышение частоты вращения его вала, а увеличение сопротивления на ведомом валу машины влечет за собой снижение этой частоты. Регулирование средней скорости вращения вала машины осуществляется путем воздействия на приток энергии к двигателю или путем изменения сопротивления на ведомом валу машины. В настоящее время широкое распространение получили центробежные, тормозные и электрические регуляторы.
Центробежные регуляторы. Принцип действия центробежных регуляторов основан на использовании силы инерции вращающихся грузов для регулирования притока топлива (или электрической энергии) к двигателю. Схема центробежного регулятора показана на рис.8.14, а. К валу регулятора 1, получающему вращение от двигателя, с помощью подвижных звеньев и муфты 2 подвешены грузы 3. Возникающие при вращении регулятора центробежные силы инерции грузов Ри посредством рычагов 4 и тяг 5 воздействуют на муфту 2, которая может скользить вдоль вала вверх и вниз. Муфта регулятора с помощью рычага 6 соединена с рабочим органом (заслонкой) 7, регулирующим питание двигателя топливом (или турбины — паром).
При нарушении равенства работ движущих сил и сил сопротивления, например, когда Ад > А с угловая скорость вала двигателя станет возрастать. В этом случае увеличится величина сил инерции Ри, благодаря чему шары начнут расходиться и муфта переместится вверх. При этом заслонка 7 опустится и уменьшится количество топлива, подаваемого в двигатель. В результате вновь восстановится равенство Ад = Ас и угловая скорость двигателя стабилизируется.
Таким образом перемещение муфты регулятора под воздействием сил инерции грузов дает возможность автоматически поддерживать равновесную угловую скорость вращения вала двигателя.
Установившееся движение машины (Ад = Ас) может проходить при различных угловых скоростях ведущего звена.
Наибольшая скорость ωmax, допустимая по условиям безопасности, соответствует «холостому» ходу машины.
Холостым называется такое движение машины, при котором энергия движущих сил затрачивается только на преодоление сил вредных сопротивлений.
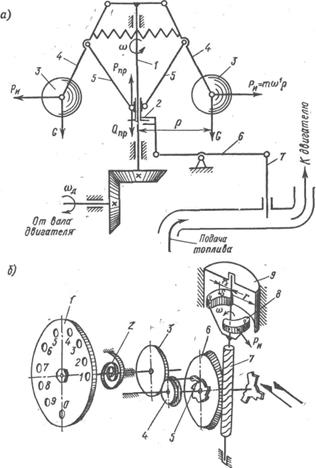
Рис.8.14
Наименьшая угловая скорость ωmin наблюдается при наибольшей нагрузке машины, когда Ад = Ас max; дальнейшее увеличение сил полезных сопротивлений вызовет нарушение этого равенства работ, которое регулятор не может восстановить, поэтому угловая скорость уменьшится и машина остановится.
Таким образом, регулятор должен обеспечивать поддержание установившегося движения машины при любом изменении скорости вращения вала в пределах от ωmin до ωmax. Это достигается подбором соответствующих значений параметров регулятора (массы и размеров звеньев, деформации пружины).
Чувствительность регулятора к колебаниям угловой скорости, т. Е. реагирование его на изменение угловой скорости, зависит от величины сил трения между звеньями регулятора. Чем меньше приведенная к муфте регулятора сила трения, тем меньшее понадобится изменение угловой скорости вала регулятора, при котором муфта придет в движение.
Тормозные регуляторы. При регулировании скорости движения с помощью тормозных регуляторов избыточная энергия двигателя затрачивается на преодоление механического, жидкостного или воздушного трения в регуляторе. Тормозные регуляторы применяются в приборах и аппаратах, потребляющих небольшую мощность, например в телеграфных аппаратах, патефонах и других приборах точной механики.
При регулировании посредством тормозных регуляторов уравнение движения машины или прибора для установившегося периода в форме моментов имеет следующий вид:
Мд = Мс + Мрег, (8.58)
где Мд, Мс и Мрег — приведенные к ведущему звену моменты движущих сил, сил сопротивлений и сил трения регулятора.
. На рис. 8.14 б приведена схема тормозного регулятора телефонного номеронабирателя. На его валу помещены тормозные колодки 8, которые под действием центробежной силы инерции Р и могут прижиматься к тормозному цилиндру 9. Для определения момента сил трения Мрег регулятора введем следующие обозначения:
т — масса колодки;
Q — сила упругости пружины;
r — радиус тормозного цилиндра;
f — коэффициент трения скольжения;
ω — угловая скорость вращения вала;
rs — расстояние от оси вращения вала до центра тяжести колодки.
Центробежная сила инерции колодки Ри = т rs ω 2. Момент сил трения регулятора
Мрег = (Ри – Q)fr = fmr rs ω 2 – fQr (8.59)
или
Мрег = к1ω2 – к2Q, (8.60)
где: к1 = fmr rs; к2 = fr.
Величина угловой скорости ω0 вала регулятора, при которой тормозная колодка станет касаться тормозного цилиндра, определится из условия
Мрег = к1ω2 – к2Q = 0 ( 8.61)
Подставив значения к1 и к2, получим ω0 = 
Пользуясь уравнением (8.59), нетрудно построить график изменения момента сил трения регулятора в зависимости от угловой скорости ω.
Регуляторы воздушного трения (ветрянки), электрические и др., широко применяемые в приборостроении, рассматриваются в специальной литературе.
Вопросы для самоконтроля:
1.Какое устройство называется регулятором?
2.Назовите виды наиболее распространенных регуляторов.
3.Каков принцип действия центробежных регуляторов?
4.В каких пределах центробежный регулятор обеспечивает режим установившегося движения?
5.Каков принцип действия тормозного регулятора?








