 2015-07-14
2015-07-14 809
8099.1.1 Виды неуравновешенности ротора
Ротор вследствие погрешностей изготовления, а также в силу неоднородности материала обнаруживает при вращении некоторую неуравновешенность возникающих сил инерции.
Неуравновешенность ротора — состояние ротора, характеризующееся таким распределением масс, которое во время вращения вызывает переменные нагрузки на опорах ротора и его изгиб.
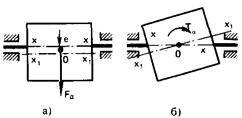
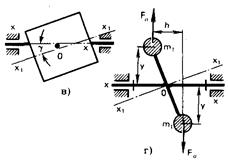
Рис.9.1
Характер неуравновешенности характеризует относительное расположение оси вращения ротора хх и главной центральной оси инерции х1 х1. Если эти оси параллельны, то имеет место статическая неуравновешенность (рис.9.1.а). Центр масс ротора О при этом смещен по отношению к оси вращения на величину эксцентриситета массы е. Если упомянутые оси пересекаются в центре масс О (рис.9.1.б), то имеет место моментная неуравновешенность.
При пересечении осей вне центра масс (рис.9.1.в) или при перекрещивании осей имеет место динамическая неуравновешенность. В частном случае динамическую неуравновешенность при пересечении осей называют квазистатической неуравновешенностью. При рассмотрении неуравновешенности задают условную точечную массу с заданным эксцентриситетом. Такую неуравновешенность называют точечной неуравновешенностью.
Статическая неуравновешенность при вращении ротора приводит к возникновению радиальной силы инерции
 , (9.1)
, (9.1)
где т - масса;
w - угловая скорость.
Моментная неуравновешенность вызывает момент сил: например, для случая сосредоточенных масс (рис.9.1.г)
Та = F a × h = m 1 yh w2. (9.2)
В общем случае
 , (9.3)
, (9.3)
где J xy - центробежный момент инерции массы тела относительно центра масс О.
Динамическая неуравновешенность характеризуется также наличием статической неуравновешенности, т. е. приводит к возникновению ` F a и ` Т a.
Для оценкинеуравновешенности используют понятие дисбаланса.
ДИСБАЛАНС (от лат. Dis - нарушение, утрата и франц. bа1аnсе — буквально — весы) - векторная величина, равная произведению неуравновешенной массы т на ее эксцентриситет относительно оси ротора.
Дисбаланс характеризуется его значением D CT = те и углом дисбаланса j, определяющим положение вектора дисбаланса в системе координат, связанной с осью ротора.
Дисбаланс измеряют и задают в плоскости, перпендикулярной оси ротора.
Неуравновешенность ротора в целом характеризуют главный вектор дисбалансов ротора ` D CT и главный момент дисбалансов ротора ` М D. Главный вектор ` D CT перпендикулярен оси ротора хх, проходит через центр его масс О и равен произведению массы ротора на ее эксцентриситет e CT. Главный вектор равен сумме дисбалансов, расположенных в различных плоскостях, перпендикулярных оси ротора.
Главный момент ` М D равен геометрической сумме моментов всех дисбалансов ротора относительно его центра масс. Главный момент перпендикулярен главной центральной оси инерции х 1 х 1 и вращается вместе с ротором. Произведения D CT ×w2 и ` М D× w2 равны главному вектору и главному моменту сил инерции, обусловленных неуравновешенностью ротора.
На рис.9.2. а два дисбаланса ` D 1 и ` D 2. Сумма проекций ` D CT1 и ` D CT2 равна главному вектору ` D CT. Сумма моментов проекций ` D M1 и ` D M2 равна главному моменту ` М D, в частном случае
` М D = ` D M1 × l
где` D M1 и ` D M2 - равные по величине и противоположно направленные проекции соответственно векторов ` D 1 и ` D 2.
j - угол между векторами ` D CT и ` М D.
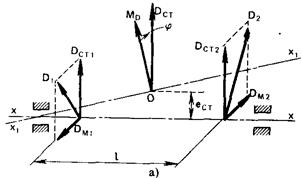
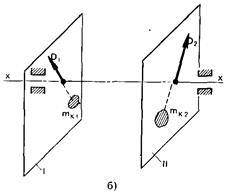
Рис.9.2
Величины ` D CT и ` М D характеризуют неуравновешенность ротора. Дисбаланс уменьшают добавлением или удалением из тела ротора массы, называемой корректирующей массой.
Операция определения значений и углов дисбалансов ротора и их уменьшение корректировкой масс называется балансировкой ротора.
Вопросы для самоконтроля:
1.Что такое «неуравновешенность ротора»? Из-за чего она может возникнуть?
2.Что называется статической неуравновешенностью?
3.В каком случае неуравновешенность называется моментной?
4.Какая неуравновешенность называется динамической?
5.Что такое дисбаланс и чем он характеризуется?
6.Чему равен главный вектор дисбалансов ротора?
7.Чему равен главный момент дисбалансов ротора?
8.Какая операция называется балансировкой ротора?








