 2015-07-14
2015-07-14 1002
1002Изучение системы движений человека с точки зрения управления включает определение состава и структуры системы, ее состояния, поведения и определение управления системой.
В кибернетике при изучении управления под системой понимают выделенное (иногда условно) объединение взаимодействующих частей, составляющее функциональное целое. Состояние системы описывается значениями ее характеристик, наблюдаемыхв тот или иной момент времени. Поведение системы проявляется в смене ее состояний, изменении характеристик (переход системы из исходного состояния в конечное). Управление системой — это процесс перевода системы в новое, заранее заданное состояние (достижение цели), определение ее поведения путем направленного воздействия, изменяющего ее характеристики.
Систему движений человека изучают с точки зрения управления обычно в такой последовательности: из каких составных частей она состоит и как они объединены (состав и структура системы); каковы характеристики ее движений (состояние системы); как выполняется процесс движения по данным регистрации характеристик (поведение системы); какие воздействия и каким путем приводят к достижению цели (управление системой).
Рассмотрим структурную схему управления. В простейшем случае имеется управляемая подсистема (объект управления — О. У.), управляющая подсистема (аппарат управления — Л. У.) и среда, в которой действует управляемая подсистема при достижении цели (рис. 37). Управляемая подсистема имеет «вход», через который в нее поступает управляющее воздействие (команда), и «выход», через который проявляется ее поведение как смена состояния. Связь (на рисунке изображена стрелками) может быть только в одном направлении — прямая. Это схема разомкнутого контура связи (см. рис. 37, о). Такая система не имеет сведений о среде и не получает данных о результатах действия. Вследствие своей «слепоты» и «глухоты» она малоэффективна в сложных переменных условиях.
В более сложной системе с замкнутым контуром связи есть каналы обратной связи (см. рис. 37, б). По ним поступают сведения о предварительном состоянии и среды, и управляемой подсистемы, а также о результате действия.
Самоуправляемая система включает в себя две подсистемы: управляемую (О. У.), выполняющую задачу, и управляющую (Л. У.), подающую команды, а также два канала обратной связи: внешней (от среды к системе) и внутренней (между подсистемами). Обратные связи превращают каналы связи в замкнутые кольца; внешнее кольцо замыкается через среду.
Различают обратные связи: а) положительные — они усиливают эффект действия системы, подтверждают целенаправленность ее действия, побуждают вести линию поведения дальше — и б ) о т р и ц а т е л ь н ы е — они направлены на снижение эффекта настоящего действия системы, так как сигнализируют об отходе от необходимой линии поведения. Для целесообразного управления бывает необходимо и усиливать, и снижать эффект действия. И тот и другой виды обратной связи могут осуществляться через одни и те же каналы
Движения спортсмена направлены на изменение условий внешнего окружения и на изменение положения собственного тела в окружающей среде. Однако спортсмен вступает во взаимодействие не со всей средой, а с ее частью — полем действия.
Часть поля действия, которое спортсмен изменяет физически,— это моторное поле. Оно физически (механически) противодействует его движениям (полезные и вредные сопротивления). Одна из частей поля действия сенсорное поле — источник внешней информации, воспринимаемой органами чувств спортсмена. Можно и нужно уметь изменять свое поле действия — то расширять его, то суживать— как в моторной, так и в сенсорной частях.
Исследуя движения человека, Н. А. Бернштейн впервые описал циклы (кольца) взаимодействия: а) периферический цикл (внешние и реактивные внутренние силы действуют на движущиеся звенья; движение последних изменяет сами названные силы) и б) центральный цикл (сигналы от движущихся звеньев воздействуют на мозг; мозг посылает команды, изменяющие движения звеньев).
В периферическом цикле взаимодействия складывается единая динамическая структура при совместном действии сил внешних и внутренних. Во внутреннем цикле взаимодействия преодолеваются огромные сложности управления в биомеханической системе.
Н. А. Бернштейн считал, что «движение возможно лишь при условии тончайшего и непрерывного, не предусмотримого заранее согласования центральных импульсов с явлениями, происходящими на периферии тела».
3.2. Информация и ее передача
Информация в системе движений — это сообщения о состоянии и изменениях среды и организма, а также команды к объекту управления. Информация вносит определенность и упорядоченность, она воспринимается системой и используется для управления.
Информация — это не материя (не вещество и не поле), а ее свойство. Информация всегда имеет материального носителя; его изменение и есть сигнал, несущий информацию. Носители сообщений об изменениях состояния организма и среды очень разнообразны.
Форма сигнала зависит от носителя и от способа переноса содержания сообщения. Если носитель не сменяется, т. е. остается одним и тем же, например свет или звук, то его усиление или ослабление, перерывы, изменения его качества называют м о д у л я ц и е й1 (изменение меры) сигнала без смены его носителя; создается сигнал, несущий сообщение.
В каналах связи носитель информации меняется многократно (звуковое колебание, нервный импульс, физико-химические изменения в мышце и т. д.). У каждого носителя свои специфические сигналы; превращение одного рода сигнала в другой обычно происходит при смене его носителя, что называется кодированием2 сигнала.
Информация поступает на вход системы (прием информации ). Вход обладает способностью к восприятию сообщений путем реакции на них. Прием именно нужной информации происходит в результате сложных процессов поиска, сбора и отбора сигналов. Важно научиться быстро и точно получать только нужную информацию. Далее следует переработка информации (кодирование, перекодирование, декодирование), сопровождающаяся сложнейшим синтезом, обобщением потоков сведений, преобразованием их в команды. Движение информации завершается ее передачей на объект управления (его вход) и выдачей на выходе всей системы в форме действия спортсмена, направленного и на внешнее окружение, и на изменение состояния самого спортсмена (рис. 38). Одновременно информация направляется на хранение в запоминающее устройство («память системы»). Память в кибернетическом смысле — это сохранение любого следа воздействия в системе. Кратковременная память используется вскоре после поступления, долговременная хранится долго. Без хранения информации невозможно ничему научиться, невозможно совершенствование системы. Извлечение из памяти неизбежно при любом акте управления; оно помогает, исходя из накопленного опыта, найти лучшее решение задачи. Предварительная информация отражает состояние системы и ее окружения до рассматриваемого действия, обеспечивает подготовку к нему. Текущая информация способствует целенаправленному управлению в течение действия.
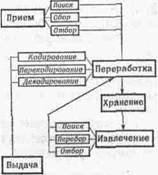
Рис. 38. Движение информации в самоуправляемой системе (ориг)
Таким образом, в самоуправляемой системе осуществляется передача информации: а) непосредственная — прием, переработка, выдача — и б) с задержкой — хранение в памяти и последующее извлечение из нее. Участие памяти является одной из основ совершенствования упражнения.








