2015-07-14
2015-07-14 1100
1100Цель работы: Ознакомление со свойствами и принципом построения механических и рабочих характеристик асинхронного электродвигателя.
I. Описательная часть.
Асинхронные электродвигатели (АД) – электрические машины переменного тока, у которых частота вращения ротора изменяется в зависимости от нагрузки.
Работа асинхронного электродвигателя основана на взаимодействии вращающегося магнитного поля статора с токами, наводимыми этим магнитным полем в роторе.
При подключении обмотки статора двигателя к источнику переменного тока создается вращающееся магнитное поле с частотой вращения n1, называемой синхронной

 ,
,
где f – частота тока в обмотке статора, Гц; p – число пар полюсов.
В результате вращения магнитного поля в обмотке ротора наводится ЭДС и появляется ток, что приводит к вращению ротора с частотой n2, несколько меньшей синхронной,
 ,
,  ,
,
где s – скольжение ротора.
Полезная мощность на валу двигателя P2 зависит от угловой скорости вращения ротора ω2 и величины тормозного момента M.
 .
.
Момент торможения, приложенный, например, при помощи фрикционного тормоза к валу АД равен M=km [Нм], где m – масса груза, кг; k –коэффициент, зависящий от площади контакта фрикционной пары и передаточного числа рычага тормоза.
Коэффициент полезного действия АД равен
 ,
,
где Р1 – активная мощность, потребляемая двигателем из сети, определяемая по показаниям ваттметра.
Коэффициент мощности асинхронного двигателя определяется отношением:
S1 – полная мощность, потребляемая АД, [ВА].
U1 – линейное напряжение [В].
I1 – линейный ток АД, [А].
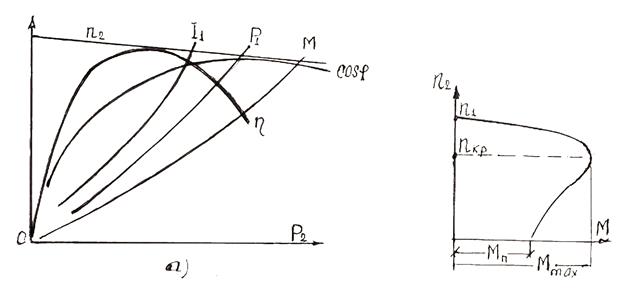
Работа двигателя характеризуется механическими и рабочими характеристиками.
Механическая характеристика двигателя отражает изменение частоты вращения вала от момента нагрузки на нем, а рабочие – изменение параметров (M, η, cos φ, I, Р1) в зависимости от мощности (Р2) на валу.
На рис.1.1 приводится примерный вид характеристик из которых видно, что η и cos φ уменьшаются с уменьшением нагрузки на валу.
Уравнение механической характеристики асинхронного двигателя выражается зависимостью
 ,
,
где: с – постоянный коэффициент, зависящий от конструкции двигателя
R2 и X2 – соответственно активные и индуктивные сопротивления ротора, [Ом].
Анализируя уравнение механической характеристики можно заключить следующее:
– при изменении сопротивления в цепи ротора меняются вращающий момент и частота его вращения
– вращающий момент двигателя пропорционален квадрату напряжения, что свидетельствует о высокой чувствительности АД к изменениям напряжения в цепи.
Благодаря таким преимуществам АД как простота устройства, надежность в работе, экономичность, низкая стоимость он находит преобладающее применение в промышленности вообще и на геологоразведочных и горных работах в частности.
Однако этим двигателям присущи и некоторые существенные недостатки:
– высокие пусковые токи; Iпуск=(5-7)Iн,
– повышенная чувствительность к качеству напряжения (M≈U2),
– недостаточно высокий пусковой момент,
– сложность регулировки частоты вращения,
– снижение параметров (η, cos φ) при низких нагрузках.
Для устранения этих недостатков применяются различные конструктивные и схемные решения, но все они усложняют конструкцию, снижая надежность.
Одним из распространенных способов уменьшения влияния отмеченных недостатков является применение в АД фазного ротора, когда к обмоткам ротора при пуске подключают через контактные кольца активные сопротивления. При этом смягчается характеристика в устойчивой зоне, снижается пусковой ток, увеличивается пусковой момент, снижается влияние трех из вышеперечисленных недостатков асинхронного короткозамкнутого двигателя. Однако конструкция двигателя усложняется, снижается надежность и экономичность его работы.