 2015-05-05
2015-05-05 18224
18224НАЗНАЧЕНИЕ И ОБЛАСТИ ПРИМЕНЕНИЯ АСИНХРОННЫХ МАШИН
Асинхронной машиной называется двухобмоточная электрическая машина переменного тока, у которой только одна обмотка (первичная) получает питание от электрической сети с постоянной частотой  , а вторая обмотка (вторичная) замыкается накоротко или на электрические сопротивления. Токи во вторичной обмотке появляются в результате электромагнитной индукции. Их частота
, а вторая обмотка (вторичная) замыкается накоротко или на электрические сопротивления. Токи во вторичной обмотке появляются в результате электромагнитной индукции. Их частота  является функцией угловой скорости ротора
является функцией угловой скорости ротора  , которая в свою очередь зависит от вращающего момента, приложенного к валу.
, которая в свою очередь зависит от вращающего момента, приложенного к валу.
Наибольшее распространение получили асинхронные машины с трехфазной симметричной разноименнополюсной обмоткой на статоре, питаемой от сети переменного тока, и с трехфазной или многофазной симметричной разноименнополюсной обмоткой на роторе.
Машины такого исполнения называют просто «асинхронными машинами», в то время как асинхронные машины иных исполнений относятся к «специальным асинхронным машинам».
Асинхронные машины используются в основном как двигатели, в качестве генераторов они применяются редко.
Асинхронный двигатель является наиболее распространенным типом двигателя переменного тока.
Разноименно-полюсная обмотка ротора асинхронного двигателя может быть короткозамкнутой (беличья клетка) или фазной (присоединяется к контактным кольцам). Наибольшее распространение имеют дешевые в производстве и надежные в эксплуатации двигатели с короткозамкнутой обмоткой на роторе, или короткозамкнутые двигатели (см. рис.1.1).
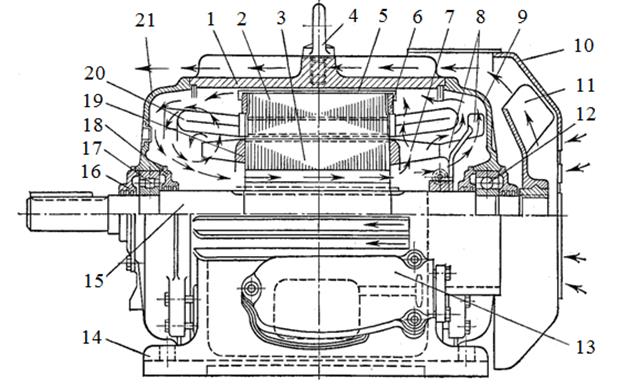
Рис.1.1
Эти двигатели обладают жесткой механической характеристикой (при изменении нагрузки от холостого хода до номинальной их частота вращения уменьшается всего на 2—5%).
Двигатели с короткозамкнутой обмоткой на роторе обладают также довольно высоким начальным пусковым вращающим моментом. Их основные недостатки: трудность осуществления плавного регулирования частоты вращения в широких пределах; потребление больших токов из сети при пуске (в 5—7 раз превышающих номинальный ток).
Двигатели с фазной обмоткой на роторе или двигатели с контактными кольцами (см. 1.2) избавлены от этих недостатков ценой усложнения конструкции ротора, что приводит к их заметному удорожанию по сравнению с короткозамкнутыми двигателями (примерно в 1,5 раза). Поэтому двигатели с контактными кольцами на роторе находят применение лишь при тяжелых условиях пуска, а также при необходимости плавного регулирования частоты вращения.
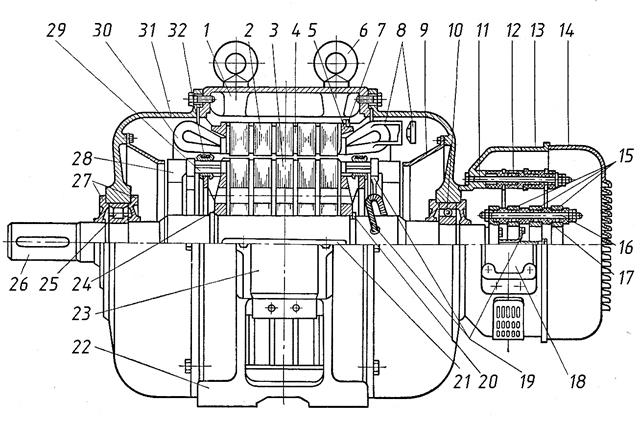
Рис.1.2
Двигатели с контактными кольцами иногда применяют в каскаде с другими машинами. Каскадные соединения асинхронной машины позволяют плавно регулировать частоту вращения в широком диапазоне при высоком коэффициенте мощности, однако из-за значительной стоимости не имеют сколько-нибудь заметного распространения.
В двигателях с контактными кольцами выводные концы обмотки ротора, фазы которой соединяются обычно в звезду, присоединяются к трем контактным кольцам. С помощью щеток, соприкасающихся с кольцами, в цепь обмотки ротора можно вводить добавочное сопротивление или дополнительную ЭДС для изменения пусковых или рабочих свойств машины. Щетки позволяют также замкнуть обмотку накоротко.
В большинстве случаев добавочное сопротивление вводится в обмотку ротора только при пуске двигателя, что приводит к увеличению пускового момента и уменьшению пусковых токов и облегчает пуск двигателя. При работе асинхронного двигателя пусковой реостат должен быть полностью выведен, а обмотка ротора замкнута накоротко. Иногда асинхронные двигатели снабжаются специальным устройством, которое позволяет после завершения пуска замкнуть между собой контактные кольца и приподнять щетки. В таких двигателях удается повысить КПД за счет исключения потерь от трения колец о щетки и электрических потерь в переходном контакте щеток.
Выпускаемые заводами асинхронные двигатели предназначаются для работы в определенных условиях с определенными техническими данными, называемыми номинальными.
К числу номинальных данных асинхронных двигателей, которые указываются в заводской табличке машины, укрепленной на ее корпусе, относятся:
- механическая мощность, развиваемая двигателем  ;
;
- частота сети ;
- линейное напряжение статора  ;
;
- линейный ток статора  ;
;
- частота вращения ротора  ;
;
 ;
;- коэффициент полезного действия  ;
;
Если у трехфазной обмотки статора выведены начала и концы фаз, то она может быть включена в звезду или треугольник. В этом случае указываются линейные напряжения и токи для каждого из возможных соединений ( Y/
Y/  ) в виде дроби
) в виде дроби  и
и  .
.
Кроме того, для двигателя с контактными кольцами приводится напряжение на разомкнутых кольцах при неподвижном роторе и линейный ток ротора в номинальном режиме.
Номинальные данные асинхронных двигателей варьируются в очень широких пределах. Номинальная мощность - от долей ватта до десятков тысяч киловатт. Номинальная синхронная частота вращения  при частоте сети 50 Гц от 3000 до 500 об/мин и менее в особых случаях; при повышенных частотах - до 100 000 об/мин и более (номинальная частота вращения ротора обычно на 2-5% меньше синхронной; в микродвигателях - на 5-20%). Номинальное напряжение от 24В до 10 кВ (большие значения при больших мощностях).
при частоте сети 50 Гц от 3000 до 500 об/мин и менее в особых случаях; при повышенных частотах - до 100 000 об/мин и более (номинальная частота вращения ротора обычно на 2-5% меньше синхронной; в микродвигателях - на 5-20%). Номинальное напряжение от 24В до 10 кВ (большие значения при больших мощностях).
Номинальный КПД асинхронных двигателей возрастает с ростом их мощности и частоты вращения. При мощности более 0,5 кВт КПД составляет 0,65-0,95, в микродвигателях 0,2-0,65.
Номинальный коэффициент мощности асинхронных двигателей, равный отношению активной мощности к полной мощности, потребляемой из сети,
также возрастает с ростом мощности и частоты вращения двигателей; при мощности более 1 кВт он составляет 0,7—0,9; в микродвигателях 0,3—0,7.
КОНСТРУКЦИЯ АСИНХРОННЫХ МАШИН С КОРОТКОЗАМКНУТЫМ РОТОРОМ
Конструктивная компоновка асинхронной машины с короткозамкнутым ротором представлена на рис. 39.1. В основных чертах она совпадает с типичной компоновкой вращающейся электрической машины.
Статор машины состоит из магнитопровода 2, трехфазной разноименнополюсной обмотки 20, выводные концы которой с помощью выводной коробки 13 присоединяются к сети переменного тока, и станины 1.
Активными элементами статора, специально предназначенными для образования вращающегося магнитного поля, являются магнитопровод 2 и обмотка 20; станина выполняет только конструктивные функции, фиксируя активные части в определенном положении (с помощью лап 14 станина неподвижно закрепляется на фундаменте).
Магнитопровод 2 набирается из изолированных пластин электротехнической стали обычно толщиной 0,5 мм. Пластины штампуются из листовой или рулонной электротехнической стали со стандартизованными размерами и изолируются с обеих сторон лаком. При наружном диаметре магнитопровода менее 1 м, что имеет место во всех асинхронных двигателях, за исключением самых крупных, его набирают из цельных кольцеобразных пластин, на внутренней стороне которых вырублены пазы нужной формы (рис. 1.3б).
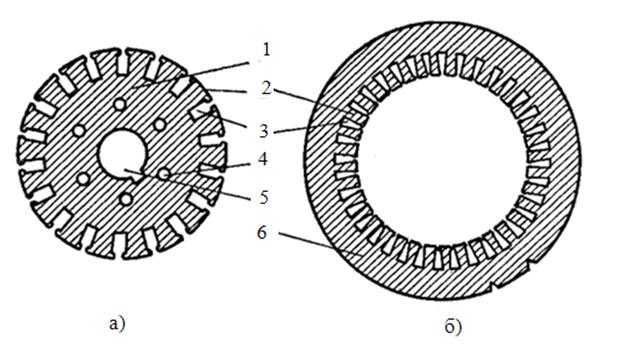
Рис.1.3
В конструкции по рис.1.3 радиальные каналы в магнитопроводе отсутствуют. В этом случае кольцевые пластины собираются в пакет и прессуются вне станины на специальной цилиндрической оправке. В спрессованном состоянии пакет пластин удерживается с помощью нажимных колец 6 и стяжных скоб 5 и лишь после укладки обмотки вставляется в станину.
При наружном диаметре магнитопровода более 1 м он набирается из отдельных сегментов и конструкция статора получается такой же, как в крупных синхронных машинах.
С целью уменьшения пульсаций магнитного поля и добавочных потерь, связанных с зубчатостью магнитопровода, обмотка статора, как правило, укладывается в асинхронных машинах в полузакрытые пазы (рис. 1.4а).
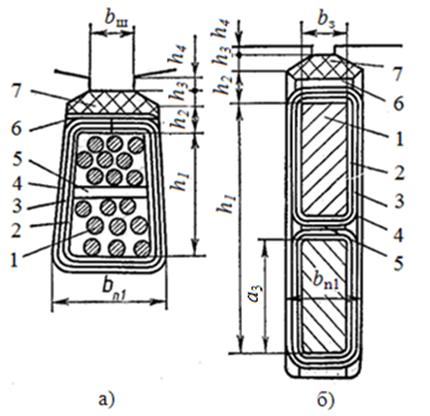
Рис.1.4
Для таких пазов пригодны как однослойные, так и двухслойные многовитковые катушечные всыпные обмотки. Катушки этих обмоток наматываются из изолированного обмоточного провода круглого сечения (1 на рис. 1.4); каждый проводник катушки «всыпается» в паз по отдельности.
Для изоляции витков катушки друг от друга оказывается достаточной собственная изоляция обмоточных проводников. Изоляция обмотки от заземленных частей, называемая корпусной изоляцией, делается в зоне пазовых и лобовых частей по-разному. Корпусная изоляция пазовой части катушки выполняется в виде «пазовой коробочки», образованной из нескольких слоев 2-4 изоляционных материалов, которая закладывается в паз перед укладкой обмотки. Обмотка закрепляется в пазах с помощью клиньев 7 из изоляционного материала. Под клинья подкладываются изоляционные прокладки 6. Изоляцией между слоями обмотки служит прокладка 5 (в однослойной обмотке эта прокладка отсутствует).
Ротор машины состоит из магнитопровода 3 (рис. 1.1), в пазах которого размещается неизолированная многофазная короткозамкнутая обмотка 19, пристроенных к ней вентиляционных лопастей 7, вала 15 и двух вентиляторов 8 и 11. Активными элементами ротора, принимающими участие в процессе преобразования энергии, являются магнитопровод 3 и обмотка 19; остальные детали имеют конструктивное назначение: вал 15 передает механическую энергию к исполнительной машине, вентиляторы 7, 8 и 11 обеспечивают циркуляцию охлаждающей среды. Более детально устройство активных частей ротора показано на рис. 1.5.
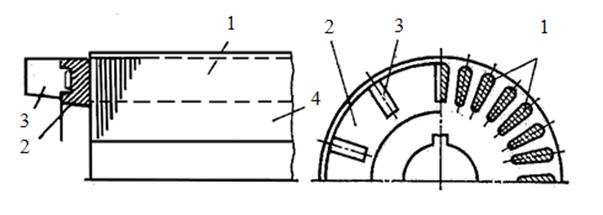
Рис.1.5
Магнитопровод ротора 4 набирается из цельных кольцевых пластин, отштампованных из листов электротехнической стали толщиной 0,5 мм, на наружной стороне которых вырублены пазы нужной формы (на рис. 1.5 - закрытые, на рис. 1.3 - полузакрытые).
Пластины магнитопровода ротора набираются на специальную оправку, спрессовываются на ней и удерживаются в запрессованном состоянии в процессе изготовления короткозамкнутой обмотки. Короткозамкнутая обмотка отливается из алюминия и не изолируется от магнитопровода. Торцевые кольца 2 (рис 1.5), замыкающие с двух сторон стержни обмотки 1, отливаются как одно целое со стержнями. Одновременно в виде приливов к короткозамыкающим кольцам отливаются вентиляционные лопасти 3.
Кроме своего основного назначения, короткозамкнутая обмотка служит также для стягивания пластин ротора после удаления оправки. Это позволяет обойтись без специальных прессующих деталей, удерживающих листы ротора в осевом направлении.
Вал ротора 15 (см. рис. 1,1) опирается на подшипники качения 12, 17, которые в свою очередь с помощью подшипниковых щитов 9, 21 и крышек подшипников 16, 18 сопрягаются со станиной 1.
Шариковый подшипник 12 центрирует ротор не только в радиальном, но и в осевом направлении, воспринимая наряду с радиальными усилиями также и осевые. Консистентная смазка подшипников закладывается в камеру между подшипниковыми крышками 16, 18 и не нуждается в замене в течение нескольких лет эксплуатации. Поскольку зазор между магнитопроводами ротора и статора при мощности более 0,5 кВт обычно не превышает 0,3-1 мм (в микромашинах 0,02-0,3 мм), вал ротора должен быть достаточно жестким, а механическая обработка конструктивных частей, обеспечивающих правильное положение оси вала в пространстве, должна производиться с высокой точностью.
На рис. 1.1 представлено типичное для серийных короткозамкнутых асинхронных двигателей исполнение по способу охлаждения и защиты от воздействия внешней среды - обдуваемое исполнение, в котором внутреннее пространство машины защищено от брызг воды и пыли. Внешний обдув двигателя создается наружным вентилятором 11 (кожух 10 защищает обслуживающий персонал от прикосновения к вентилятору и направляет воздух к оребренной поверхности станины). Циркуляция воздуха внутри машины усиливается с помощью внутреннего вентилятора 8 и вентиляционных лопастей 7 (направление движения воздуха показано на рисунке стрелками).
Подъем двигателя при монтаже производится с помощью рыма 4.
КОНСТРУКЦИЯ АСИНХРОННЫХ МАШИН С ФАЗНЫМ РОТОРОМ
Конструктивная компоновка асинхронной машины с контактными кольцами представлена на рис. 1.2. Двигатели этого типа отличаются от короткозамкнутых только устройством ротора.
Статор двигателя может иметь те же разновидности конструктивных исполнений, что и в короткозамкнутом двигателе. Статор двигателя по рис. 1.2 с радиальными каналами в магнитопроводе. Статор состоит из станины 1, в которой с помощью нажимных шайб 5 и шпонок 7 укреплены пакеты магнитопровода, набранные из кольцевых пластин 2. Для образования каналов между пакетами служат распорки 4. В пазы магнитопровода статора уложена двухслойная обмотка, катушки 30 которой связаны между собой соединениями 8. Выводные концы обмотки статора сосредоточены в выводной коробке 23. К фундаменту станина крепится лапами 22. Для подъема двигателя при монтаже служат рымы 6.
Ротор двигателя состоит из вала 26, на котором с помощью нажимных колец 24, шпонки 21 и разрезной шпонки 20 укреплены в запрессованном состоянии пакеты магнитопровода, набранные из кольцевых пластин 3 (см. рис. 1.3а). Радиальные вентиляционные каналы между пакетами образуются дистанционными распорками, помещенными на каждом зубцовом делении. В полузакрытых пазах магнитопровода ротора, показанных в разрезе па рис. 1.4. б, размещается трехфазная двухслойная волновая стержневая обмотка 29, соединенная обычно в звезду, выводные концы которой посредством электрических кабелей 19, проведенных через отверстие в валу, присоединены к контактным кольцам 15.
Стержни 1 обмотки с заранее наложенной витковой изоляцией 2, 3 (рис. 1.4.б) вставляются в пазы с торцевой стороны магнитопровода. Предварительно в пазы вводится пазовая коробочка 4, играющая роль корпусной изоляции. Для укрепления стержней в радиальном направлении и усиления витковой и корпусной изоляции используются изоляционные прокладки 5,6. Центробежная сила, действующая на пазовую часть обмотки, воспринимается клиньями 7 из изоляционного материала.
Лобовые части обмоток укладываются на нажимные шайбы 24 (рис. 1.2), которые одновременно выполняют роль обмоткодержателей, и охватываются снаружи кольцевыми бандажами 32, рассчитанными на восприятие центробежной силы.
Электрическое соединение вращающейся обмотки ротора с внешними (неподвижными) электрическими цепями производится с помощью контактных колец, на которые выведены обмотки, и щеточного устройства, связанного с неподвижными электрическими цепями. Контактные кольца выполняются как отдельный узел машины. Кольца 15, изготовленные из стали, отделяются друг от друга и от корпуса с помощью изоляционных прокладок 17.
Все эти детали стягиваются вместе изолированными шпильками 16 и крепятся с помощью фланца к торцу вала. К кольцам плотно прижимаются щетки, электрически соединенные с токоподводящими шинами 12 щеточной траверсы (кроме этих шин, на рис. 1.2 показаны болты 11 щеточной траверсы и ее изоляционные детали, а также корпус 13 и крышка 14; щетки и щеткодержатели не показаны). Необходимый электрический контакт щеток с кольцами обеспечивается с помощью щеткодержателей, укрепленных на шинах 12. Соединение токоподводящих шин 12 щеточной траверсы с пусковым реостатом производится в выводной коробке контактных колец 18.
Правильное расположение оси ротора по отношению к статору и возможность вращения ротора обеспечиваются с помощью таких же деталей, как в короткозамкнутом двигателе по рис. 1.1 (подшипников качения, роликового 25 и шарикового 10, подшипниковых крышек 27 и подшипниковых щитов 31).
По способу охлаждения и защиты от воздействия внешней среды двигатель по рис. 1.2 имеет продуваемое каплезащищенное исполнение. Внутри машины воздух перемещается аксиально-радиально. Наружный воздух поступает в машину с двух сторон через отверстия в подшипниковых щитах 31 и направляется диффузорами 9 к вентиляционным лопастям 28, промежуткам между лобовыми частями стержней обмотки ротора и к аксиальным каналам в магнитопроводе ротора; далее воздух из аксиальных каналов попадает в радиальные каналы в магнитопроводе ротора и статора; воздух от вентиляционных лопастей 28 и лобовых частей ротора омывает лобовые части обмотки статора. Нагретый потерями в машине воздух попадает в пространство между ярмом статора и корпусом станины, откуда он выбрасывается наружу через боковые отверстия в корпусе. Необходимый для циркуляции воздуха напор создается радиальными каналами в роторе, которые играют роль центробежных вентиляторов.
Принцип действия асинхронной машины.
Предположим, что ротор асинхронного двигателя неподвижен и к его валу не приложен тормозной момент. Если трехфазную обмотку статора подключить к трехфазной сети, то токи, протекающие по обмотке, создадут вращающееся магнитное поле. Угловая скорость этого поля, называемая синхронной, равна  , ( - частота сети). Магнитное поле при своем вращении пересекает проводники обмотки ротора и индуцирует в них ЭДС. Направление индуцируемой в одном из проводников ротора ЭДС показано на рис. 20.7 (при определении направления ЭДС по правилу правой руки принималось, что поле неподвижно, а движение проводника происходит в сторону, противоположную вращению поля).
, ( - частота сети). Магнитное поле при своем вращении пересекает проводники обмотки ротора и индуцирует в них ЭДС. Направление индуцируемой в одном из проводников ротора ЭДС показано на рис. 20.7 (при определении направления ЭДС по правилу правой руки принималось, что поле неподвижно, а движение проводника происходит в сторону, противоположную вращению поля).
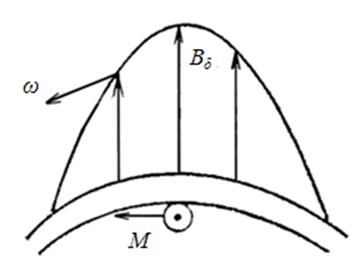
Рис. 1.6. Направление электромагнитного момента, созданного током ротора
Так как обмотка ротора замкнута, то в ней возникает ток  , активная составляющая которого будет по направлению совпадать с ЭДС. Ток , взаимодействуя с магнитным полем, создаст вращающий момент
, активная составляющая которого будет по направлению совпадать с ЭДС. Ток , взаимодействуя с магнитным полем, создаст вращающий момент  , под действием которого ротор придет во вращение. Как можно установить по правилу левой руки, направление момента и вращения ротора будут совпадать с направлением вращения поля.
, под действием которого ротор придет во вращение. Как можно установить по правилу левой руки, направление момента и вращения ротора будут совпадать с направлением вращения поля.
По мере разгона ротора его угловая скорость  будет увеличиваться, но даже при отсутствии нагрузки на валу (холостой ход) он не сможет достигнуть скорости вращения поля. Объясняется это тем, что ток в роторе, а следовательно, и вращающий момент могут возникать только в том случае, если магнитное поле пересекает проводники ротора, т.е. когда
будет увеличиваться, но даже при отсутствии нагрузки на валу (холостой ход) он не сможет достигнуть скорости вращения поля. Объясняется это тем, что ток в роторе, а следовательно, и вращающий момент могут возникать только в том случае, если магнитное поле пересекает проводники ротора, т.е. когда  . Так как при холостом ходе в машине существует небольшой тормозной момент
. Так как при холостом ходе в машине существует небольшой тормозной момент  , обусловленный механическим трением в подшипниках, трением ротора о воздух и потерями на перемагничивание стали, то для его преодоления двигатель должен создавать вращающий момент, а поэтому должно выполняться неравенство
, обусловленный механическим трением в подшипниках, трением ротора о воздух и потерями на перемагничивание стали, то для его преодоления двигатель должен создавать вращающий момент, а поэтому должно выполняться неравенство  .
.
Ток и момент двигателя увеличиваются с ростом ЭДС в роторе, которая пропорциональна разности  . При увеличении момента нагрузки на валу двигателя
. При увеличении момента нагрузки на валу двигателя  должен увеличиваться электромагнитный момент двигателя
должен увеличиваться электромагнитный момент двигателя  , вследствие чего возрастает разность .
, вследствие чего возрастает разность .
Таким образом, для рассматриваемого двигателя характерной особенностью является несинхронное (асинхронное) вращение его ротора с магнитным полем. Отсюда и его название - асинхронный двигатель. Разницу между скоростями или частотами вращения ротора и поля принято оценивать величиной, называемой скольжением  :
:
 ,
,
где  угловые скорости поля и ротора.
угловые скорости поля и ротора.
Так как частота вращения магнитного поля относительно ротора равна  , то частота индуцируемых в его обмотке ЭДС и тока
, то частота индуцируемых в его обмотке ЭДС и тока
 .
.
Откуда следует, что частота в роторе не постоянна, а изменяется пропорционально скольжению.
Найдем диапазон изменения скольжения в двигательном режиме. При  (ротор неподвижен) = l. Если в идеальном случае
(ротор неподвижен) = l. Если в идеальном случае  , то = 0. Следовательно, в двигательном режиме работы машины скольжение изменяется в пределах от 0 до 1. При номинальной нагрузке скольжение обычно находится в пределах 0,015- 0,05 или 1,5-5 %. При холостом ходе оно равно долям процента.
, то = 0. Следовательно, в двигательном режиме работы машины скольжение изменяется в пределах от 0 до 1. При номинальной нагрузке скольжение обычно находится в пределах 0,015- 0,05 или 1,5-5 %. При холостом ходе оно равно долям процента.
Скорость ротора , выраженная через скольжение ,  , а частота вращения
, а частота вращения  . Отсюда видно, что частота вращения ротора близка к частоте вращения поля и мало изменяется при возрастании нагрузки.
. Отсюда видно, что частота вращения ротора близка к частоте вращения поля и мало изменяется при возрастании нагрузки.
Номинальная частота вращения двигателя зависит от частоты вращения магнитного поля и не может быть выбрана произвольно. При стандартной частоте промышленного тока = 50 Гц возможные частоты вращения магнитного поля  приведены ниже.
приведены ниже.
 | ||||||||
 , об/мин , об/мин |
В зависимости от необходимой номинальной частоты вращения обмотки двигателя выполняют на соответствующее число пар полюсов  . Асинхронные двигатели общего назначения выпускаются с синхронными частотами вращения 3000, 1500, 1000, 750, 600, 500 об/мин.
. Асинхронные двигатели общего назначения выпускаются с синхронными частотами вращения 3000, 1500, 1000, 750, 600, 500 об/мин.
Асинхронная машина может работать также в генераторном режиме и режиме электромагнитного тормоза.
Генераторный режим возникает в том случае, когда ротор с помощью постороннего двигателя будет вращаться в направлении поля со скоростью, большей скорости поля. Скольжение в этом режиме будет отрицательным. Теоретически можно как угодно увеличивать скорость ротора относительно вращающегося поля. Поэтому при работе асинхронной машины в генераторном режиме скольжение находится в пределах от =0 до =-  .
.
Если ротор под действием посторонних сил начнет вращаться в сторону, противоположную вращению поля, то возникает режим электромагнитного тормоза. Так как скорость ротора отрицательна, то скольжение в этом режиме будет >1. Режим электромагнитного тормоза начинается при и может продолжаться теоретически до  , при этом скольжение изменяется от 1 до
, при этом скольжение изменяется от 1 до  . Таким образом, пределы изменения скольжения в асинхронной машине от
. Таким образом, пределы изменения скольжения в асинхронной машине от  до
до  . На рис. дана шкала скольжений, а также показаны направления скоростей ротора и поля для различных режимов работы машины.
. На рис. дана шкала скольжений, а также показаны направления скоростей ротора и поля для различных режимов работы машины.
Электромагнитный момент асинхронной машины
Выражение для электромагнитного момента асинхронной машины может быть получено через электромагнитную мощность  (1)
(1)
. Из Г-образной схемы замещения асинхронной машины найдем приведенный ток ротора  , (2)
, (2)
где  - активные сопротивления обмотки статора и приведенной обмотки ротора;
- активные сопротивления обмотки статора и приведенной обмотки ротора;
 - индуктивные сопротивления рассеяния обмотки статора и приведенной обмотки ротора;
- индуктивные сопротивления рассеяния обмотки статора и приведенной обмотки ротора;
 - фазное напряжение обмотки статора,
- фазное напряжение обмотки статора,
 - комплексный коэффициент, модуль которого равен отношению первичного напряжения к первичной ЭДС
- комплексный коэффициент, модуль которого равен отношению первичного напряжения к первичной ЭДС  при идеальном холостом ходе.
при идеальном холостом ходе.
Поделим на угловую скорость поля и заменим ток  его значением из. Тогда выражение для электромагнитного момента асинхронной машины имеет вид
его значением из. Тогда выражение для электромагнитного момента асинхронной машины имеет вид
 (3).
(3).
Если принять, что параметры машины являются постоянными, то момент при = const является функцией только скольжения s. Поэтому эта формула удобна для построения механической характеристики машины = f(). Выясним характер изменения этой зависимости. При малых значениях скольжения (s<<1) в квадратных скобках знаменателя можно пренебречь всеми слагаемыми кроме  . Тогда получим
. Тогда получим
 , т.е. при малых электромагнитный момент изменяется пропорционально скольжению и зависимость = f() имеет линейный характер.
, т.е. при малых электромагнитный момент изменяется пропорционально скольжению и зависимость = f() имеет линейный характер.
При скольжениях, близких или больших единицы, можно пренебречь активными сопротивлениями обмоток по сравнению с их индуктивными сопротивлениями . Тогда можно записать
 , откуда следует, что при больших момент обратно пропорционален скольжению и кривая = f () имеет вид гиперболы.
, откуда следует, что при больших момент обратно пропорционален скольжению и кривая = f () имеет вид гиперболы.
На основании изложенного, кривая = f () при = const имеет характер, изображенный на рис. 1.7.
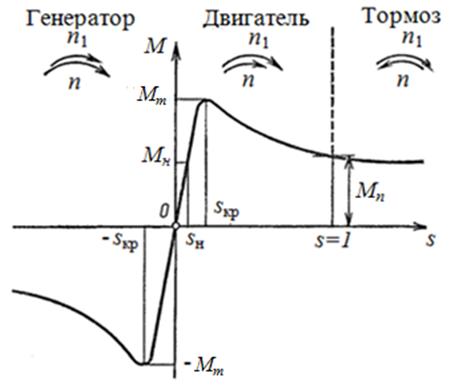
Рис.1.7 Mm
Физически такой сложный вид этой характеристики объясняется аналогичным характером изменения активной составляющей тока ротора. С увеличением скольжения активная составляющая тока сначала растет, а затем вследствие увеличения частоты индуктивное сопротивление ротора возрастает, угол  увеличивается и активная составляющая тока начинает уменьшаться, несмотря на увеличение полного тока .
увеличивается и активная составляющая тока начинает уменьшаться, несмотря на увеличение полного тока .
Зависимость = f () на рис. 1.7 построена для трех возможных режимов работы асинхронной машины. В области скольжений от 0 до 1 характеристика соответствует двигательному режиму работы (), в области скольжений от 1 до - режиму электромагнитного тормоза (ротор вращается в сторону, противоположную вращению поля) и в области от 0 до - — генераторному режиму ( ).
).
Согласно выражению (3) электромагнитный момент при любом значении скольжения пропорционален квадрату приложенного напряжения .
На механической характеристике рис. 1.7 показаны три наиболее важные точки двигательного режима. Нормальная работа двигателя обычно протекает на прямолинейной части характеристики. Здесь располагается точка, соответствующая номинальному моменту  . Скольжение при этом моменте
. Скольжение при этом моменте  = 0,015-0,05. Перегрузочная способность двигателя оценивается по максимальному моменту
= 0,015-0,05. Перегрузочная способность двигателя оценивается по максимальному моменту  . Скольжение, соответствующее этому моменту, называется критическим и обычно
. Скольжение, соответствующее этому моменту, называется критическим и обычно  = 0,07-0,15. Часто выражают в долях . Кратность максимального момента для асинхронных двигателей
= 0,07-0,15. Часто выражают в долях . Кратность максимального момента для асинхронных двигателей  = 1,7-3. Более высокие значения
= 1,7-3. Более высокие значения  соответствуют двигателям с меньшим числом полюсов.
соответствуют двигателям с меньшим числом полюсов.
Момент при скольжении = 1 называется начальным пусковым моментом  . Он является важной величиной для оценки пусковых свойств двигателя. Момент также выражается в долях . Для асинхронных двигателей общего назначения кратность начального пускового момента
. Он является важной величиной для оценки пусковых свойств двигателя. Момент также выражается в долях . Для асинхронных двигателей общего назначения кратность начального пускового момента  = 1-1,35.
= 1-1,35.
Максимальный и пусковой электромагнитные моменты
Кривая  имеет два явно выраженных максимума: один — в генераторном, другой - в двигательном режимах. Определение проводится обычным путем. Для этого выражение (3) дифференцируют по скольжению и первую производную функции приравнивают нулю, т. е.
имеет два явно выраженных максимума: один — в генераторном, другой - в двигательном режимах. Определение проводится обычным путем. Для этого выражение (3) дифференцируют по скольжению и первую производную функции приравнивают нулю, т. е.  = 0. В результате получают значение критического скольжения :
= 0. В результате получают значение критического скольжения :
 . (4)
. (4)
Подставив из (4) в (3), после преобразований получаем максимальный электромагнитный момент:
 (5).
(5).
Знак плюс в (4) и (5) относится к двигательному или тормозному режимам работы, знак минус - к генераторному.
Из (4) и (5) следует, что значения как в двигательном, так и в генераторном режиме одинаковы, а максимальный момент в генераторном режиме больше, чем в двигательном. Обычно из-за малого сопротивления  разница в моментах получается небольшой. Из (5) также следует, что максимальный момент не зависит от активного сопротивления цепи ротора
разница в моментах получается небольшой. Из (5) также следует, что максимальный момент не зависит от активного сопротивления цепи ротора  , однако согласно (4) это сопротивление оказывает влияние на скольжение , при котором асинхронная машина развивает момент .
, однако согласно (4) это сопротивление оказывает влияние на скольжение , при котором асинхронная машина развивает момент .
На рис. 1.8 приведены кривые для различных значений  при работе машины с >0. Они показывают, что с увеличением максимум момента смещается в область больших скольжений, сохраняя при этом свое значение.
при работе машины с >0. Они показывают, что с увеличением максимум момента смещается в область больших скольжений, сохраняя при этом свое значение.
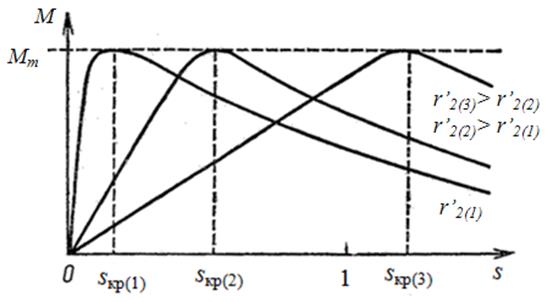
рис1.8
В соответствии с (5) пропорционален квадрату приложенного к обмотке статора напряжения. Поэтому снижение напряжения приводит к более сильному уменьшению кратности максимального момента и перегрузочной способности двигателя.
В асинхронных машинах активное сопротивление статора в несколько раз меньше индуктивных сопротивлений . Поэтому для практических целей, полагая = 0 из (4) и (5) получим
 (6)
(6)
 (7).
(7).
Из (7) видно, что максимальный момент обратно пропорционален индуктивным сопротивлениям рассеяния обмоток статора и ротора . Поэтому при проектировании машины для увеличения в первую очередь следует уменьшать эти сопротивления.
Начальный пусковой электромагнитный момент соответствует значению электромагнитного момента в начальный момент пуска двигателя, т. е. при = 1, Согласно выражению (3)
 (8).
(8).
Пусковой момент при данных значениях параметров машины также пропорционален квадрату приложенного напряжения.
Из выражения (8) следует, что с увеличением момент растет до тех пор, пока при = 1 не будет = . При этом, согласно равенству (4),
 .
.
При дальнейшем увеличении момент будет снова уменьшаться.
Механическая характеристика асинхронного двигателя и эксплуатационные требования к ней.
Полезный вращающий момент на валу двигателя меньше электромагнитного момента М на величину
 , которая соответствует механическим и добавочным потерям, покрываемым за счет механической мощности
, которая соответствует механическим и добавочным потерям, покрываемым за счет механической мощности  на роторе. Поэтому
на роторе. Поэтому  .
.
Механическая характеристика двигателя представляет собой зависимость  или, наоборот
или, наоборот  .
.
Так как при нагрузке момент мал по сравнению с и , то можно положить  0 или включить в значение статического тормозного момента
0 или включить в значение статического тормозного момента  , который развивается рабочей машиной или механизмом, приводимым во вращение асинхронным двигателем. Поэтому ниже в качестве механической характеристики двигателя будем рассматривать зависимость между (или s) и электромагнитным моментом :
, который развивается рабочей машиной или механизмом, приводимым во вращение асинхронным двигателем. Поэтому ниже в качестве механической характеристики двигателя будем рассматривать зависимость между (или s) и электромагнитным моментом :
 . Изображенные на рис.1.7 и рис.1.8 кривые момента при указанных условиях и представляют собой механические характеристики асинхронного двигателя с постоянными параметрами.
. Изображенные на рис.1.7 и рис.1.8 кривые момента при указанных условиях и представляют собой механические характеристики асинхронного двигателя с постоянными параметрами.
Очевидно, что вид механических характеристик существенно зависит от значения вторичного активного сопротивления.
Процесс пуска и установившийся режим работы асинхронного двигателя
Рассмотрим процесс пуска асинхронного двигателя с короткозамкнутой вторичной обмоткой при его включении на полное напряжение сети. Так производится пуск подавляющего большинства находящихся в эксплуатации асинхронных двигателей. При рассмотрении процесса пуска не будем принимать во внимание электромагнитные переходные процессы, связанные с тем, что при включении любой электрической цепи электромагнитного механизма под напряжение и при изменении режима его работы токи достигают практически установившихся значений не сразу, а после истечения некоторого времени, которое пропорционально электромагнитной постоянной времени Т, зависящей от индуктивности и активного сопротивления цепи.
Обычно при пуске асинхронного двигателя время его разбега до нормальной скорости значительно больше длительности электромагнитных переходных процессов, и поэтому влияние этих процессов на процесс пуска невелико. Следовательно, процесс пуска можно рассматривать на основе полученных выше зависимостей для вращающего момента и токов в условиях работы двигателя при установившемся режиме с заданным скольжением.
На рис. 1.9 показана механическая характеристика  асинхронного двигателя и механическая характеристика
асинхронного двигателя и механическая характеристика  некоторого производственного механизма, приводимого во вращение двигателем.
некоторого производственного механизма, приводимого во вращение двигателем.
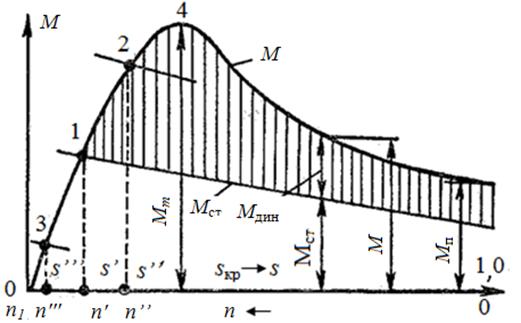
Рис. 1.9
Уравнение моментов агрегата «двигатель — производственный механизм» имеет вид
 ,где
,где
представляет собой динамический вращающий момент агрегата, пропорциональный моменту его инерции  . Если при = 0, как это показано на рис. 1.9, пусковой момент > , то
. Если при = 0, как это показано на рис. 1.9, пусковой момент > , то  > 0,
> 0,  > 0 и ротор двигателя придет во вращение. Ускорение ротора происходит до тех пор, пока (заштрихованная область на рис. 1.9) = - >0.
> 0 и ротор двигателя придет во вращение. Ускорение ротора происходит до тех пор, пока (заштрихованная область на рис. 1.9) = - >0.
В точке 1 (рис. 1.9) достигается равновесие моментов.
При этом =0, =0 и наступает установившийся режим работы двигателя под нагрузкой со скоростью вращения  и скольжением
и скольжением  . Величина будет тем больше, чем больше и чем больше, следовательно, нагрузка двигателя. Если при работе двигателя его нагрузку (статический момент производственного механизма ) увеличить (кривая 2 на рис. 1.9), то возрастет, а уменьшится. При уменьшении нагрузки (кривая 3 на рис. 1.9), наоборот, уменьшится, а увеличится.
. Величина будет тем больше, чем больше и чем больше, следовательно, нагрузка двигателя. Если при работе двигателя его нагрузку (статический момент производственного механизма ) увеличить (кривая 2 на рис. 1.9), то возрастет, а уменьшится. При уменьшении нагрузки (кривая 3 на рис. 1.9), наоборот, уменьшится, а увеличится.
Переход двигателя к новому установившемуся режиму работы при изменении нагрузки физически происходит следующим образом. Если возрастет, то будет < , < 0, < 0 и движение ротора двигателя станет замедляться. При этом скольжение возрастает, в соответствии с чем увеличиваются также э. д. с.  и ток вторичной цепи. В результате электромагнитный момент увеличивается и уменьшение (увеличение ) происходит до тех пор, пока снова не наступит равенство моментов = . При уменьшении нагрузки процесс протекает в обратном направлении.
и ток вторичной цепи. В результате электромагнитный момент увеличивается и уменьшение (увеличение ) происходит до тех пор, пока снова не наступит равенство моментов = . При уменьшении нагрузки процесс протекает в обратном направлении.
Как видно из рис. 1.9, при круто поднимающейся начальной (левой) части кривой момента = f () асинхронный двигатель обладает жесткой механической характеристикой, т.е., при изменении нагрузки скорость вращения двигателя изменяется мало. Все нормальные асинхронные двигатели проектируются с жесткой механической характеристикой, когда и относительно малы. При этом и, следовательно, электрические потери в роторе при работе также малы и двигатель имеет высокий к. п. д.
Перегрузочная способность асинхронного двигателя
При работе двигателя на нормальном устойчивом участке механической характеристики (влево от точки 4 на рис. 1.9), его нагрузку, опре  деляемую статическим моментом рабочего механизма или машины, можно постепенно поднять до значения = (точка4 на рис. 1.9), причем устойчивая работа сохраняется вплоть до этой точки. При дальнейшем увеличении нагрузки, когда > , двигатель будет быстро затормаживаться и либо остановится, либо перейдет в устойчивый режим работы при малой скорости вращения. В обоих случаях, если двигатель не будет отключен, возникает опасный в отношении нагрева режим.
деляемую статическим моментом рабочего механизма или машины, можно постепенно поднять до значения = (точка4 на рис. 1.9), причем устойчивая работа сохраняется вплоть до этой точки. При дальнейшем увеличении нагрузки, когда > , двигатель будет быстро затормаживаться и либо остановится, либо перейдет в устойчивый режим работы при малой скорости вращения. В обоих случаях, если двигатель не будет отключен, возникает опасный в отношении нагрева режим.
Таким образом, в принципе работа асинхронного двигателя возможна при 0< < . Однако продолжительная работа при в отношении нагрева также недопустима.
Кроме того, при работе двигателя необходимо иметь некоторый запас по моменту, так как возможны кратковременные перегрузки случайного характера, а также кратковременные или длительные понижения напряжения сети.
Так как ~  , то при уменьшении , например, на 15% максимальный момент двигателя снизится до 0,853 = 0,72 или 72 % от своего первоначального значения.
, то при уменьшении , например, на 15% максимальный момент двигателя снизится до 0,853 = 0,72 или 72 % от своего первоначального значения.
В связи с изложенным, должно выполняться > .
Отношение максимального момента при номинальном напряжении к номинальному
(25-35)
определяет перегрузочную способность двигателя и называется кратностью максимального момента. Для двигателей разных мощностей и скоростей вращения требуется, чтобы > 1,7 -2,2. Меньший предел относится к двигателям со скоростью вращения < 750 об/мин.
Кратности начального пускового момента и пускового тока
Часто асинхронные двигатели можно пускать в ход на холостом ходу или с малой нагрузкой на валу и нагружать их до номинальной или иной мощности после достижения нормальной скорости вращения. В других случаях рабочие механизмы и машины (например, вентиляторы) имеют механическую характеристику =  такого вида, что при = 0 статический момент мал и постепенно повышается с увеличением . При этом не требуется, чтобы двигатель развивал большой пусковой момент. Однако иногда двигатели необходимо пускать в ход под значительной нагрузкой (например, крановые механизмы, подъемники, различные мельницы и т. д.), и в этих случаях требуется, чтобы двигатели имели большие пусковые моменты.
такого вида, что при = 0 статический момент мал и постепенно повышается с увеличением . При этом не требуется, чтобы двигатель развивал большой пусковой момент. Однако иногда двигатели необходимо пускать в ход под значительной нагрузкой (например, крановые механизмы, подъемники, различные мельницы и т. д.), и в этих случаях требуется, чтобы двигатели имели большие пусковые моменты.
Асинхронные двигатели с фазным ротором можно пускать в ход с помощью реостата, включаемого на время пуска во вторичную цепь двигателя. Как следует из рис. 1.8, при этом пусковой момент двигателя увеличивается, а пусковой ток уменьшается. Поэтому стандарты не регламентируют значений пусковых моментов и токов асинхронных двигателей с фазным ротором. В то же время выпускаемые электромашиностроительными заводами серийные асинхронные двигатели с короткозамкнутым ротором должны удовлетворять разнообразным условиям пуска производственных механизмов и их пусковые моменты должны быть достаточно велики.
Короткозамкнутые асинхронные двигатели должны иметь при пуске под номинальным напряжением кратность начального пускового момента
не менее 0,7-1,8. Меньшие значения относятся к двигателям большей мощности. Кратность пускового тока

для двигателей с короткозамкнутым ротором разных мощностей и разных скоростей вращения при этом должна быть не больше 5,5-7,0.
1.10. Рабочие характеристики асинхронного двигателя.
При изменении нагрузки двигателя происходит изменение как потребляемых из сети тока  и мощности
и мощности  , так и угловой скорости (или скольжения ), КПД
, так и угловой скорости (или скольжения ), КПД  и
и  . Нагрузкой для двигателя служит нагрузочный момент , приложенный к его валу. При увеличении нагрузочного момента соответственно увеличивается электромагнитный момент, создаваемый двигателем:
. Нагрузкой для двигателя служит нагрузочный момент , приложенный к его валу. При увеличении нагрузочного момента соответственно увеличивается электромагнитный момент, создаваемый двигателем:
= + =  ;
;
здесь — момент, обусловленный механическими и добавочными потерями.
Момент слабо зависит от нагрузки. Он относительно мал и можно принять, что . От момента зависит механическая мощность  , снимаемая с вала двигателя:
, снимаемая с вала двигателя:
= (9).
Зависимости , , , , , = f() называются рабочими характеристиками двигателя. Примерный их вид показан на рис. 1.10.
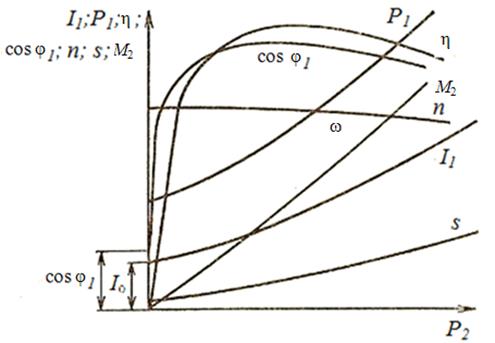
Рис. 1.10
холостом ходе, когда =0 и =0, ток будет равен току холостого хода  . Как и у трансформатора, этот ток является в основном намагничивающим и создает основное магнитное поле. Однако из-за наличия воздушного зазора между статором и ротором относительное значение его больше, чем у трансформатора, и составляет 25—50 % номинального тока статора.
. Как и у трансформатора, этот ток является в основном намагничивающим и создает основное магнитное поле. Однако из-за наличия воздушного зазора между статором и ротором относительное значение его больше, чем у трансформатора, и составляет 25—50 % номинального тока статора.
Мощность , потребляемая двигателем из сети при холостом ходе, расходуется на потери внутри машины: механические потери, магнитные потери в статоре, электрические потери в обмотке статора от тока .
При увеличении момента ток ротора должен увеличиваться. Возрастание тока происходит за счет увеличения индуцируемой в обмотке ротора ЭДС  = вследствие снижения угловой скорости (увеличения ). Поэтому зависимость =
= вследствие снижения угловой скорости (увеличения ). Поэтому зависимость =  () имеет падающий характер. Однако, у большинства асинхронных двигателей изменение частоты вращения при нагрузке незначительно, и характеристика = () является достаточно жесткой. Скольжение с ростом будет возрастать. При холостом ходе из-за наличия механических и магнитных потерь (момент
() имеет падающий характер. Однако, у большинства асинхронных двигателей изменение частоты вращения при нагрузке незначительно, и характеристика = () является достаточно жесткой. Скольжение с ростом будет возрастать. При холостом ходе из-за наличия механических и магнитных потерь (момент

