 2015-08-21
2015-08-21 2321
2321Погрузочная машина с нагребающими лапами относится к машинам типа ПНБ. Машина состоит (рис.42) из ходовой части, рабочего органа, конвейера для приема и передачи горной массы в транспортные средства. Привод отдельных механизмов чаще всего индивидуальный.
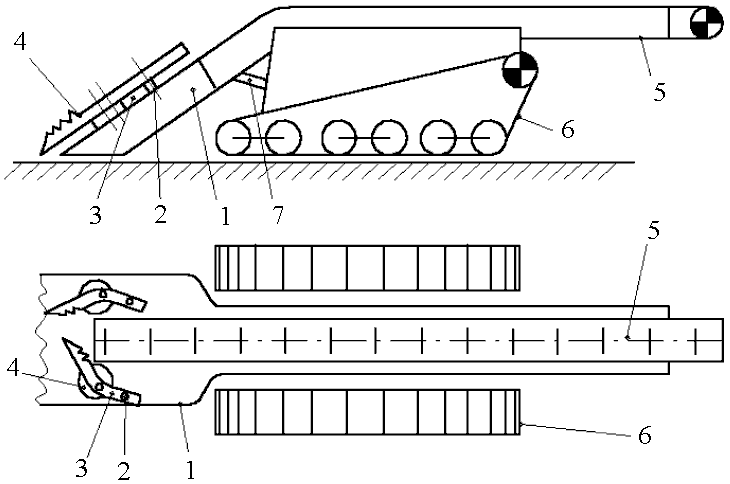
Рис.42. Погрузочная машина с нагребающими лапами
1 – приемная плита с гидроцилиндром 7 для изменения угла ее наклона; 2 –
направляющие сухари или ролики; 3 – нагребающие лапы; 4 – ведущие диски, вращающиеся от приводов; 5 – передаточный конвейер (скребковый); 6 – гусеничный движитель
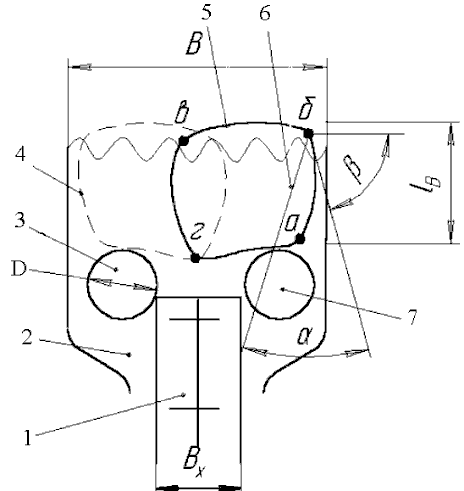 Рис.43. Траектории движения кромок нагребающих лап при захвате горной массы из штабеля 1 – передаточный конвейер 2 – приемная плита; 3, 7 – диски; 4, 5 – траектории движения левой и правой лап; 6 – ось правой лапы |

Рабочий заборно-погрузочный орган выполнен в виде двух нагребающих лап, являющихся элементами кривошипно-кулисного или двухкривошипного механизма.
Процесс погрузки горной массы осуществляется за счет поочередного внедрения нагребающих лап в штабель и подачи захваченной горной массы на перегрузочный конвейер.
Непрерывно повторяемые циклы, совершаемые каждой нагребающей лапой, можно разделить на четыре периода (рис.43):
1) внедрение лапы в штабель (а-б);
2) нагребание груза на приемную плиту (б-в);
3) перемещение груза по плите до перегрузочного конвейера (в-г);
4) движение лапы вхолостую с возвратом в первоначальное положение (г-д).
От параметров загрузочного устройства, включая траектории движения кромок нагребающих лап, формы лап, скорости их движения, зависит величина сопротивлений зачерпыванию груза из штабеля, нагрузки на машину и мощности приводов механизмов.
Положение лапы относительно штабеля и условия ее внедрения в штабель характеризуются углами α и β, где α – угол между осью лапы и касательной к траектории ее движения в данной точке; β – угол между передней кромкой приемной плиты и касательной к траектории движения лапы.








