 2015-08-12
2015-08-12 602
602I Проблема.
Современное развитие космонавтики позволяет всерьез рассматривать проекты освоения человечеством планет Солнечной системы [1]
Сроки строительства лунных, марсианских или астероидных станций пока не известны. Одновременно со строительством станций постоянного пребывания людей на других планетах начнётся их изучение.
Характеристики твердых оболочек планет, относительно хорошо известны лишь у Земли и Луны. В основном данные о внутреннем строении Земли получены из регистрации и анализа сейсмических волн, возникающих при землетрясениях [2] и картографирования гравитационных полей с помощью спутников [3].
В данном проекте рассматривается возможность использования маятника Эйри в измерениях гравитационных полей и изучении внутренней структуры других планет.
II Физическая основа.
Математический маятник.
Математический маятник (далее по тексту – ММ), вообще говоря, абстракция. Он представляет из себя материальную точку, т.е. тело, имеющее массу, линейные размеры которого равны нулю, подвешенное на невесомой нерастяжимой нити (или жёстком невесомом стержне) в однородном поле сил тяготения. На практике за ММ принимают тело (чечевицу маятника), размеры которого много меньше длины нити подвеса, которая считается практически не растяжимой. Ускорение свободного падения в этой модели принимают за постоянную величину. Такой маятник, в случае незначительного начального отклонения нити от вертикали (~ 5о-10о ), способен совершать гармонические колебания около положения равновесия [4].
Установим зависимость периода колебаний ММ от других величин.
Рассмотрим вначале пружинный маятник – механическую систему в которой реализуются гармонические колебания.
Пусть трение отсутствует, а силы, действующие на груз по вертикали, уравновешивают друг друга. Пусть масса груза m, коэффициент жесткости пружины k.
Под гармоническими колебаниями понимают колебания, происходящие под действием возвращающей силы, пропорциональной смещению от положения равновесия, которые происходят по синусоидальному закону.
 , (1)
, (1)
где k –коэффициент возвращающей силы, в данном случае, что существенно, совпадающий с коэффициентом жесткости пружины;
x – смещение груза от положения равновесия.
 (2)
(2)
Где х – смещение груза от положения равновесия
хо - максимальное смещение (амплитуда) от положения равновесия;
 – круговая частота;
– круговая частота;
t – время;
ϕо – начальная фаза;
 – фаза.
– фаза.
 =
=  (3)
(3)
 (4)
(4)
Но F = -kx является неуравновешенной силой и, следовательно, по II закону Ньютона
F=ma (5)
C учётом (1), (2), (4) и (5)


 (6)
(6)
Но  , по определению, где Т- период.
, по определению, где Т- период.
Тогда
 и
и
 (7)
(7)
Вернемся к математическому маятнику.
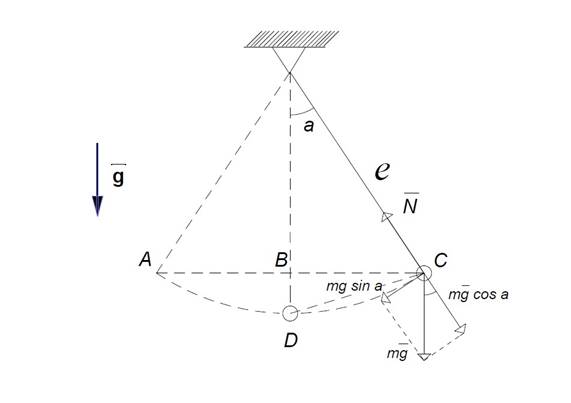
Здесь:  начальный угол,
начальный угол,
 - мал,
- мал,
измеряется в радианной мере,
l – длина нити подвеса.
При малых углах ВС ≈ DC и хорды DC и AC приблизительно равны соответствующим дугам.
Составляющая силы тяжести mg sin  является возвращающей силой.
является возвращающей силой.
 (8)
(8)
Здесь знаки уже учтены при проекции.
 (9)
(9)
 (10)
(10)
(10) подставляем в (7)

 (11)
(11)
Период колебаний зависит только от длины нити подвеса и ускорения свободного падения. При неизменной длине подвеса перед колебаниями ММ является функцией только ускорения свободного падения. Это обстоятельство может быть использовано при гравиметрических измерениях, т.е. в измерениях поля силы тяжести.








