 2015-08-13
2015-08-13 1025
1025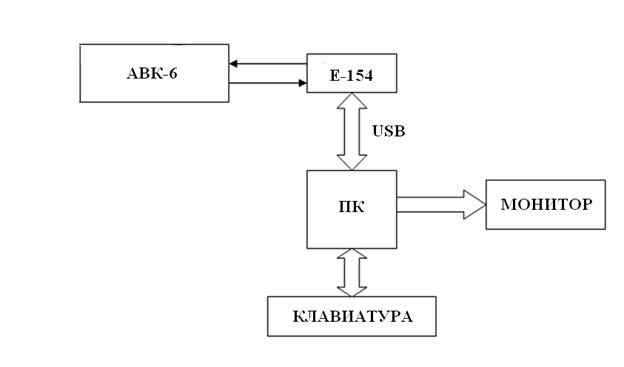
АВК-6 – аналоговый вычислительный комплекс.
Е-154 – измерительный модуль.
ПК – персональный компьютер.
Модель формирования сигнала
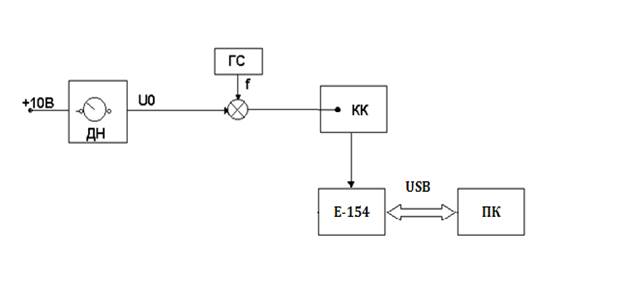
ДН – делитель напряжения, ГС – генератор сигналов, КК – клеммная колодка, Е-154 – измерительный модуль, ПК – персональный компьютер.
Задание:
Экспериментальное исследование свойств и особенностей следующих алгоритмов первичной обработки информации:
· фильтрации;
· проверки достоверности информации;
· аналитической градуировки датчика;
Разностные уравнения исследуемых алгоритмов:
- Разностные уравнения фильтров экспоненциального сглаживания и скользящего среднего:
В непрерывном варианте свойства фильтра экспоненциального сглаживания описывается дифференциальным уравнением:
.
Передаточная функция звена описывается уравнением:
.
Дифференциальное уравнение апериодического звена имеет вид:
.
Заменив производную разностью, получено разностное уравнение:
 ,
,
где γ – параметр настройки фильтра, вычисляемый по формуле:

,
,
где Т – постоянная времени, Т0 – период опроса датчика.
В аналоговом виде (непрерывный вариант) уравнение фильтра скользящего среднего имеет вид:
.
Заменив интеграл суммой (применяя для интегрирования метод прямоугольников), получено:
,
где Т – время усреднения, вычисляемое по формуле:

,
где n – число точек усреднения, параметр настроек фильтра.
- Разностные уравнения статистических фильтров:
Передаточная функция статистического фильтра первого порядка описывается уравнением:

.
Математическое ожидание описывается уравнением:

.
Несмещенная оценка фильтра описывается уравнением:
.
При учете 
 ,
,
где  ,
,  - параметры настройки фильтра.
- параметры настройки фильтра.
Минимизируя значение ошибки фильтрации, получено:
.
Для программной реализации берут равную T0 – период опроса датчика.
Разностное уравнение:
 .
.
При n =0 имеем статистический фильтр нулевого порядка W (p)= b0
 .
.
При использовании данной формулы y (t) будет смещённой оценкой полезного сигнала x (t), т.е.
 ,
,
где  -математическое ожидание выходного сигнала.
-математическое ожидание выходного сигнала.
Для получения несмещённой оценки необходимо использовать следующую функцию:
 .
.
В этом случае математическое ожидание описывается уравнением:
 ,
,
где b0 – параметр настройки, описывается уравнением:

.
Для программной реализации статистического фильтра нулевого порядка используют формулу:
 .
.
Асимптотические полиномы:
Достоинствомявляетсявозможность предварительной оценки степени полинома до расчёта коэффициента. Расчёт коэффициентов асимптотических полиномов приведен в таблице:








