 2015-08-13
2015-08-13 422
422Программное обеспечение для управления роботом было написано на языке С# с использованием MS Visual Studio и SDK EZ-robot.
Для создания и настройки путей была создана форма управления путями.
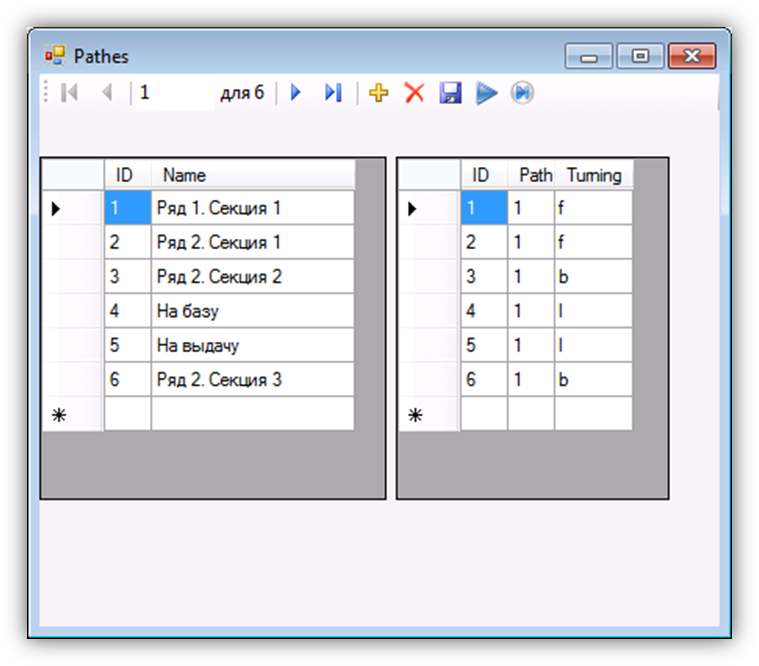
Рисунок 27. Форма "управления путями"
Для управления схвата создана форма «управление схватом». На этой форме задаются положения манипулятора. Из различных положений можно составить действия.
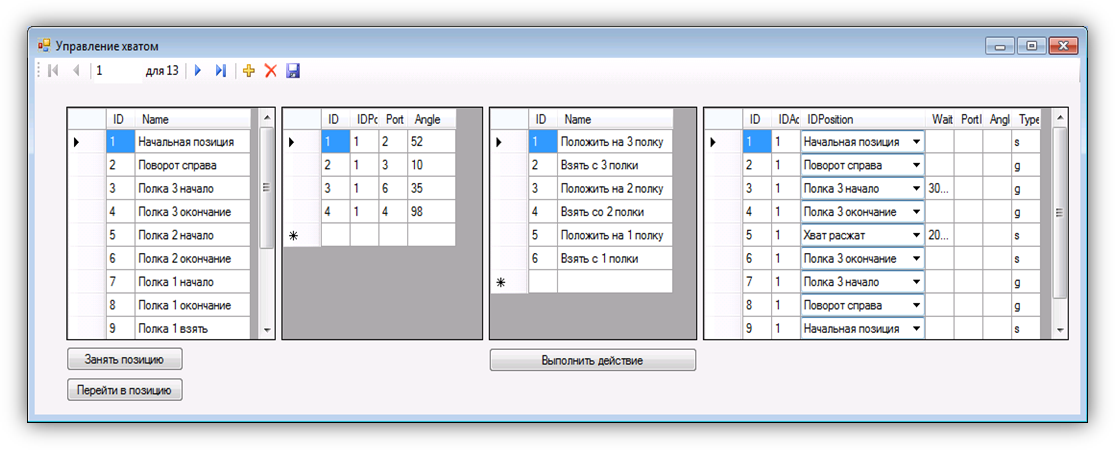
Рисунок 28. Форма "управление схватом"
Основной формой управления роботом являются форма короба. На этой форме задаются полки имеющиеся в наличии, и действия необходимые для того чтобы положить короб на эту полку.
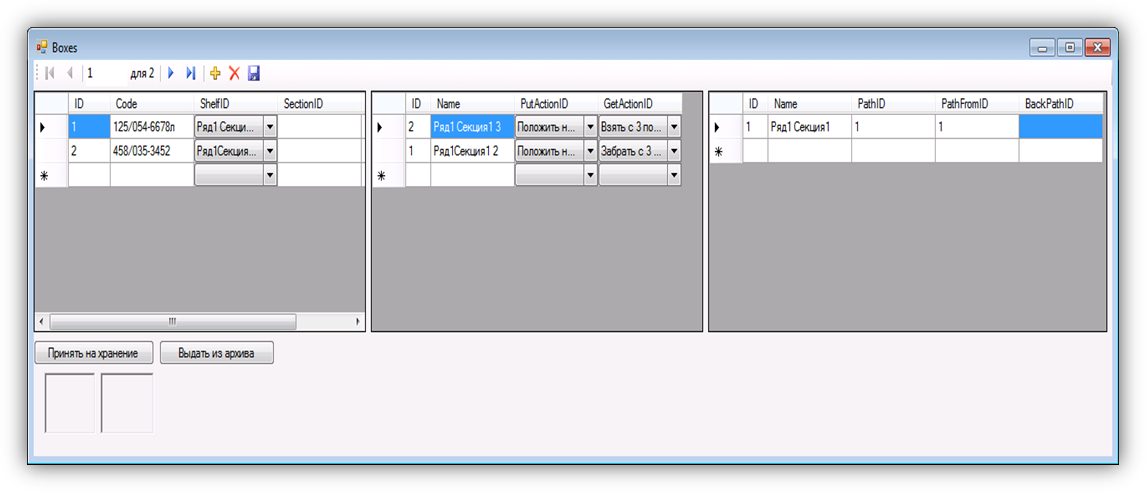
Рисунок 29. Главная форма управления роботом
Для того чтобы отдать роботу команду принять на хранение, необходимо нажать на кнопку «принять на хранение».
Для того чтобы выдать короб, необходимо выбрать в первой таблице нужный короб и нажать кнопку «выдать из архива».
Основной алгоритм действий робота представлен на рисунке 30.
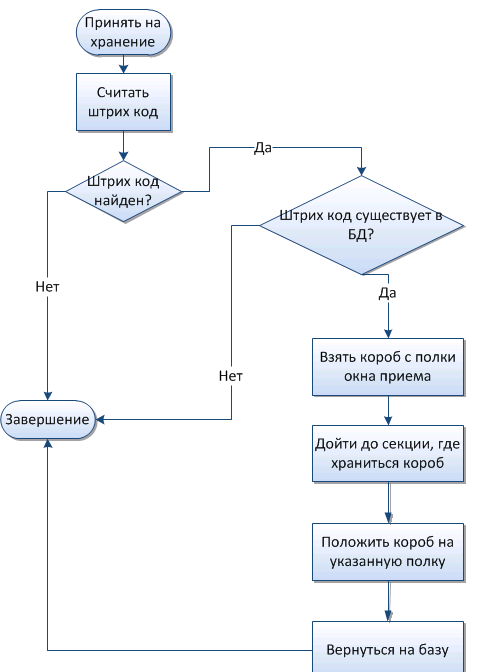
Рисунок 30. Блок-схема принятия на хранение короба
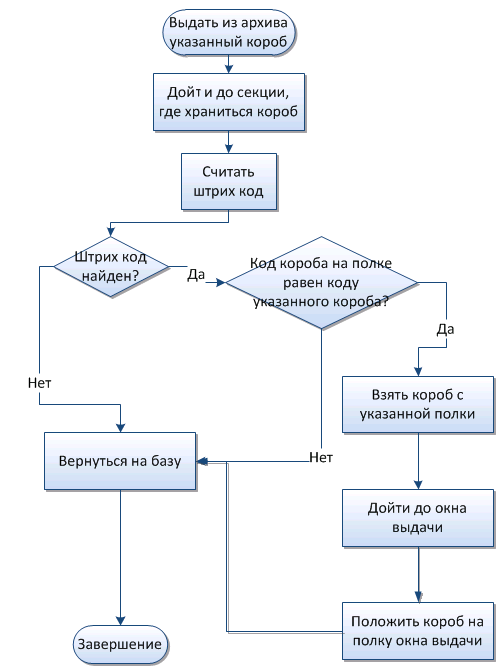
Рисунок 31. Блок-схема выдачи короба
Структура базы данных представлена на рисунке 32
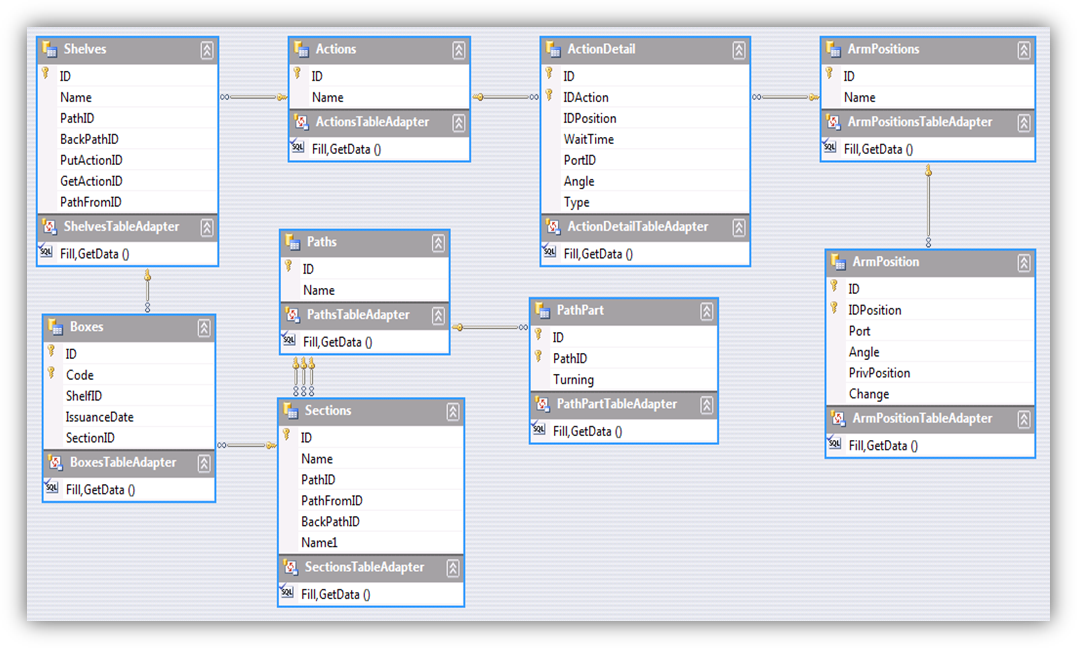
Рисунок 32. Структуры базы данных
Для тестирования была создана форма, представленная ниже. На ней можно задать различные углы всех сервоприводов, двигать робота вперед и назад, поворачивать его.
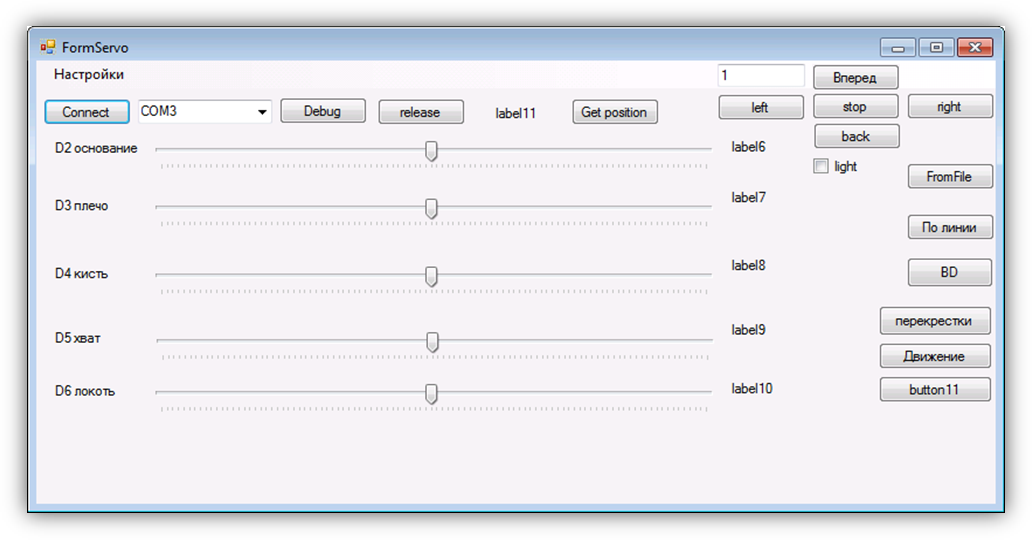
Рисунок 33. Форма для тестовой настройки








