 2015-08-13
2015-08-13 927
927Для определения углов сервоприводов для разных положений манипулятора воспользуемся решением обратной задачи кинематики.(5)
Дано: Длина двух звеньев манипулятора L1 = L2 = 8 см. Координаты положения узла схвата – точка В (13, 2.5), см. рисунок 18
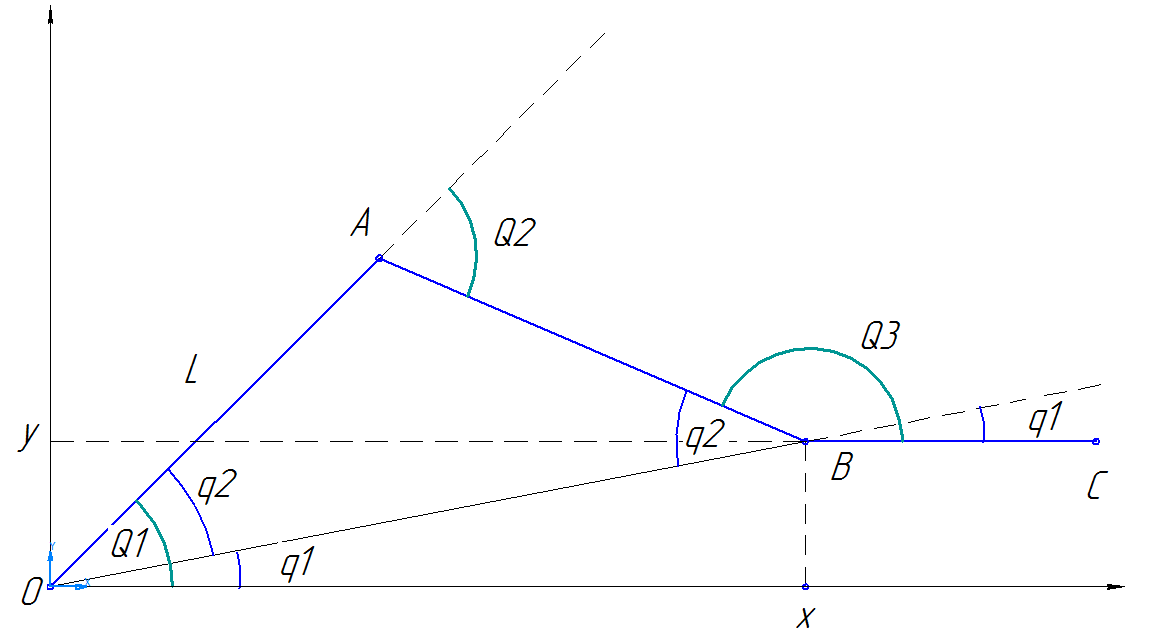
Рисунок 18. Обратная задача кинематики. Схват выше крепления
Проведём прямую ОB, соединяющую начало координат O с заданной точкой В (x, y).
ОB^2 = x^2 + y^2
x = ОB*cos(q1)
y = ОB*sin(q1)
где q1 – угол между осью OX и прямой ОB, отсюда
q1 = arccos(x/ОB) илиq1 = arctg(y/x)
Пусть q2 – угол между прямой ОB и плечом L1 отсюда:
Q1 = q1 +q2
Для случая, когда схват манипулятора опускается ниже оси Х (см. Рисунок 19)
Q1 = q2 – q1
Найдем q2 при помощи теоремы косинусов, которая говорит:
Для плоского треугольника со сторонами a,b,c и углом alpha, противолежащим стороне a, справедливо соотношение:
a^2 = b^2 + c^2 - 2*b*c*cos(alpha)
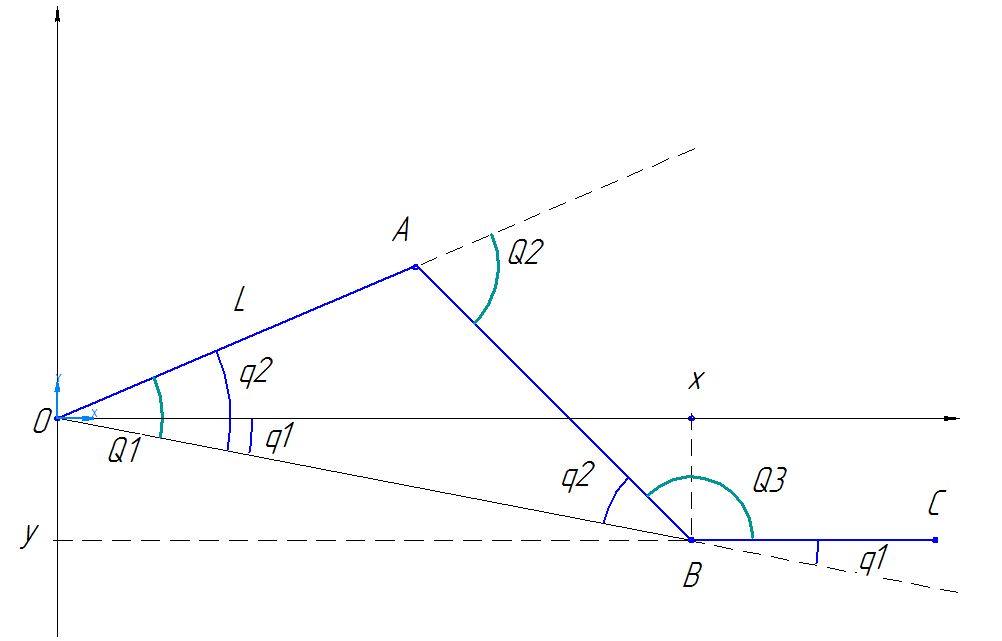
Рисунок 19. Обратная задача кинематики. Схват ниже крепления
в нашем случае, по теореме косинусов:
L2^2 = B^2 + L1^2 - 2*ОB*L1*cos(q2)
=> q2 = arccos(L1^2 - L2^2 + OB^2 / 2*OB*L1)=>
q2 = arccos(L^2 - L^2 + OB^2 / 2*OB*L)=>
q2 = arcos(OB / 2L)
Q1 = q1 + q2 = arccos(x/B) +arccos(OB / 2L)
Т.к. ∆ OAB равносторонний, то угол q1 равен углу q2. По теореме о сумме углов треугольника третий угол равенq3= 180– 2 *q2.
Т.к. угол Q2 и q3 смежные, то их сумма равно 180, следовательно
Q2 = 2 * q2
Т.к. BC параллельна ось ОХ, то
Q3 = 180 – q2 + q1.
Для случая, когда схват манипулятора опускается ниже оси Х
Q3 = 180 – q2 -q1.
Таким образом, получаем углы для шести положений манипулятора:
Таблица 1
| Первая полка | Вторая полка | Третья полка | ||||||
| L | 8.00 | 8.00 | L | 8.0000 | 8.0000 | 8.00 | 8.00 | |
| x | 13.00 | 4.00 | x | 13.0000 | 4.0000 | 13.00 | 4.00 | |
| y | -2.50 | -2.50 | y | 2.5000 | 2.5000 | 9.30 | 9.30 | |
| B^2=X^2+Y^2 | 175.25 | 22.25 | B^2=X^2+Y^2 | 175.2500 | 22.2500 | 255.49 | 102.49 | |
| B | 13.24 | 4.72 | B | 13.2382 | 4.7170 | 15.98 | 10.12 | |
| q1= arccos(x/B) | 10.89 | 32.01 | q1= arccos(x/B) | 10.8855 | 32.0054 | 35.58 | 66.73 | |
| q2=arccos(B/2L) | 34.17 | 72.85 | q2=arccos(B/2L) | 34.1687 | 72.8537 | 2.56 | 50.75 | |
| Q1=q2-q1 | 23.28 | 40.85 | Q1=q1+q2 | 45.0542 | 104.8591 | 38.14 | 117.48 | |
| Q2=2*q2 | 68.34 | 145.71 | Q2=2*q2 | 68.3374 | 145.7075 | 5.12 | 101.50 | |
| Q3= 180+q1-q2 | 134.95 | 75.14 | Q3= 180-q1-q2 | 156.7168 | 139.1516 | 213.02 | 195.98 |
Для более плавного и равномерного перемещения из одного положения манипулятора в другое, переход выполняется за 20 шагов.








