 2015-08-21
2015-08-21 1454
1454Манипулятор – механическое устройство, предназначенное для воспроизведения рабочих функций рук человека. В основе манипуляторов незамкнутые кинематические цепи с несколькими степенями свободы.Каждая степень свободы управляется отдельным приводом.Все механические движения манипуляторов делятся на:1) Переносные2) Ориентирующие.
Переносные движения обеспечивают перемещение объекта манипулирования в требуемую точку пространства, а ориентирующие движения выполняют его ориентацию нужным способом.
Рабочая зона манипулятора будет объемной (пространственной), если число переносных степеней свободы  .
.
Число ориентирующих степеней свободы обычно  .
.
1) Манипулятор 
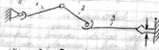
Переносное движение и степени свободы:


 - степени свободы.
- степени свободы.



Часть рабочей зоны, в которой рука манипулятора выполняет свои функции, называется зоной обслуживания.
Для каждой точки зоны обслуживания существует такой телесный (пространственный) угол  , внутри которого схват может подойти к этой точке.
, внутри которого схват может подойти к этой точке.
- угол сервиса.

 - коэффициент сервиса в данной точке.
- коэффициент сервиса в данной точке.

Маневренность манипулятора – число степеней свободы при неподвижном схвате.

41. Эта задача состоит в определении реактивных сил и моментов в кинематических парах, а также движущих сил и моментов приводных двигателей. Эта задача решается методом кинетостатики, основанном на принципе Даламбера.
Главный вектор сил инерции звена:

Главный момент сил инерции определяется в подвижной системе координат, связанной со звеном:

 - тензор инерции в центре масс.
- тензор инерции в центре масс.
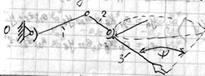
43. Общая нормаль, проведенная в точке контакта сопряженных поверхностей, проходит через линию центров О1О2 и делит эту линию на части, обратно пропорциональные отношению угловых скоростей.
Передаточное отношение

Механизм, машина. Звено, стойка. Входные и выходные звенья. Кинематич. пары и их классфифкация. Кинематич. цепи.
44. Эвольвента образуется путем перекатывания производящей прямой KyNy без скольжения по основной окружности радиуса rb.
Радиус произвольной окружности – ry. ONy || tt
Из треугольника ONyKy следует, что
 (1)
(1)
Т.к. KyNy перекатывается без скольжения по основной окружности, то 
rb(qy + ay) = rb . tg ay
qy = tg ay - ay (2)
qy = inv ay
qy – инволюта;
Уравнения (1) И (2) являются уравнениями эвольвенты в параметрической форме.
Свойства эвольвенты.
Форма эвольвенты зависит от радиуса основной окружности. При стремлении rb  ,эвольвента превращается в прямую линию (пример рейка).
,эвольвента превращается в прямую линию (пример рейка).
Производящая прямая KyNy является нормалью к эвольвенте в данной тоске.
Эвольвента начинается от основной окружности. Внутри основной окружности точек эвольвенты нет.
46. Свойства эвольвентного зацепления.
Эвольвентное зацепление молочувствительно к погрешностям изготовления, т.е. при отклонении межосевого расстояния от номинала передаточное отношение зубчатой передачи не изменится.
Линия зацепления N1N2 является общей нормалью к сопряженным эвольвентным профилям.
Контакт эвольвент осуществляется только на линии зацепления.
Эвольвентную зубчатую передачу составляют, как минимум, из 2-х зубчатых колес, при этом в рассмотрение вводится две начальные окружности радиусами rw1 и rw2.
Меньшее зубчатое колесо в обычной понижающей зубчатой передаче называется шестерня.
47. Одним из качественных показателей зубчатой передачи является коэффициент перекрытия  , равный
, равный  , где рв – шаг по основной окружности. Коэффициент показывает сколько пар зубьев в среднем одновременно находится в зацеплении. Другим качественным показателем является коэффициент скольжения, который учитывает влияние геометрии передачи и её кинематики на скольжение и износ профилей, скользящих друг по другу
, где рв – шаг по основной окружности. Коэффициент показывает сколько пар зубьев в среднем одновременно находится в зацеплении. Другим качественным показателем является коэффициент скольжения, который учитывает влияние геометрии передачи и её кинематики на скольжение и износ профилей, скользящих друг по другу
48. Зацепление между режущим инструментом и нарезаемым колесом называется станочным. В станочном зацеплении начальная окружность всегда совпадает с делительной. Производящий исходный контур – проекция режущей грани инструмента на плоскость, перпендикулярную оси вращения заготовки.
49. При нарезании нулевых колёс с малым числом зубьев может возникнуть явление врезания головок зубьев режущего инструмента в ножки зубьев колеса. Это явление называется подрезанием зуба условием отсутствия подрезания является соблюдение любого из неравенств:


52. Цилиндрические колёса с косыми зубьями применяются при передаче вращения между параллельными и перекрещивающимися осями. В передаче с параллельными осями углы βº обоих колёс равны по величине и противоположны по направлению при внешнем зацеплении и одинаковы по направлению при внутреннем зацеплении. Угол βº называется углом наклона зубьев по делительному цилиндру радиуса r.
В косозубом колесе различают торцовый mt, нормальный mn и осевой mx модули, причём стандартное значение имеет нормальный модуль mn, соответствующий размерам зуба, замеренным по нормали nn к его оси. Аналогично различают торцовый pt, нормальный pn и осевой px шаг связь между которыми определяется формулами: Большим достоинством зацеплений с косыми зубьями является возможность получения малогабаритных передач


54. Червячные передачи служат для передачи и преобразования вращательного движения между скрещивающимися в пространстве осями.
Передаточное отношение в червячных передачах определяется, как отношение числа зубьев червячного колеса к числу заходов
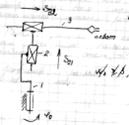
55. Кулачковые механизмы могут быть плоскими и пространственными,осевыми (е=0) и внеосными (е≠0) с плоским, тарельчатым или роликовым толкателем, где ролик устанавливается для уменьшения трения и износа.
В процессе работы толкатель совершает в соответствии с рисунком 3 движения:
поступательно вверх – в этом случае толкатель взаимодействует с участком 01;
стоит на месте (выстой) –
контакт с участком 12.
Здесь постоянный радиус кривизны.
 толкатель опускается (сближение) – контакт с участком 23.
толкатель опускается (сближение) – контакт с участком 23.
В первой фазе подъему толкателя (фаза удаления) на профиле кулачка соответствует угол ψудал;
в фазе выстоя – ψвыс;
в фазе сближения – ψсб.ψудал + ψвыс + ψсб = ψраб – рабочий угол профиля кулачка.
56/ Угол давления – угол между вектором линейной скорости выходного звена (толкателя) и реакцией, действующей с ведущего звена (кулачка) на выходное звено. Эта реакция без учета сил трения направлена по общей нормали к взаимодействующим поверхностям. Угол давления определяется экспериментально.
При достижении углов больше допустимого, возможен перекос оси толкателя в направляющей.
58. Заменяя кулачковый механизм стержневым (рис. 60, б), план ускорения которого можно построить из условия подобия (рис. 60, в):
∆ КАЕ ~ ∆ πkв,
получим  ,
,
т. е.  и
и  или
или
 .
.
рис. 60
Следовательно, просуммировав две диаграммы S(φ) и  , построенные в одном масштабе
, построенные в одном масштабе  , получим величину rmin
, получим величину rmin

