 2015-09-06
2015-09-06 495
495Для курсовой работы рекомендуется выбрать статический АПУ, в котором реализованы обратные связи по угловой скорости тангажа ωz и нормальной перегрузке nу, позволяющие влиять как на относительный коэффициент затухания ξ0, так и на опорную частоту недемпфированных колебаний ω0. Дополнительное отклонение руля высоты с помощью АПУ имеет вид:
 .
.
Расчет и выбор значений коэффициентов усиления АПУ  осуществляется в расчетном диапазоне высот и скоростей в такой последовательности:
осуществляется в расчетном диапазоне высот и скоростей в такой последовательности:
1. определяются располагаемые значения коэффициентов :
Здесь Tcn ≥ 0,02 с - постоянная времени сервопривода.
2. определяются потребные значения коэффициентов исходя из условия обеспечения желаемых значений ξзад≈0,6 (с) и ωзад≈6 (1/с) - примерно в центре области хорошей устойчивости и управляемости для самолета данного класса:
3. Окончательно выбираются коэффициенты :
Таблица 6. Результат расчета по выбору коэффициентов усиления АПУ.
H=500м
| M | q, н/ 
| mzω 1/рад | ω*2
1/ 
| Kωzрасп с | Knyрасп | Kωzпотр с | Knyпотр | Kωzmin с | Knymin |
| 0,3 | -3,47 | 5,226 | 8,16 | 1,651125 | 5,267618 | 5,140248 | 5,267618 | 1,651125 | |
| 0,4 | -3,47 | 7,08 | 4,6 | 0,709585 | 2,858606 | 1,575324 | 2,858606 | 0,709585 | |
| 0,5 | -3,47 | 8,99 | 2,96 | 0,370015 | 1,762228 | 0,624972 | 1,762228 | 0,370015 | |
| 0,6 | -3,49 | 10,995 | 2,46 | 0,26042 | 1,404814 | 0,346999 | 1,404814 | 0,346999 | |
| 0,7 | -3,51 | 12,109 | 2,99 | 0,275632 | 1,659804 | 0,326994 | 1,659804 | 0,326994 | |
| 0,8 | -3,55 | 13,32 | 3,41 | 0,2789 | 1,840958 | 0,294155 | 1,840958 | 0,294155 |
H=4000м
| M | q, н/
| mzω 1/рад | ω*2
1/
| Kωzрасп с | Knyрасп | Kωzпотр с | Knyпотр | Kωzmin с | Knymin |
| 0,3 | -3,47 | 3,495 | 12,63 | 2,64762 | 8,462208 | 12,72959 | 8,462208 | 2,64762 | |
| 0,4 | -3,47 | 4,726 | 7,13 | 1,135498 | 4,656533 | 3,94327 | 4,656533 | 1,135498 | |
| 0,5 | -3,47 | 5,988 | 4,58 | 0,590926 | 2,913526 | 1,581107 | 2,913526 | 0,590926 | |
| 0,6 | -3,49 | 7,309 | 3,81 | 0,415067 | 2,360074 | 0,887388 | 2,360074 | 0,415067 | |
| 0,7 | -3,51 | 8,034 | 4,63 | 0,438451 | 2,119896 | 0,771382 | 2,119896 | 0,771382 | |
| 0,8 | -3,55 | 8,820 | 5,28 | 0,442761 | 2,160505 | 0,749757 | 2,160505 | 0,749757 |
H=7000м
| M | q, н/
| mzω 1/рад | ω*2
1/
| Kωzрасп с | Knyрасп | Kωzпотр с | Knyпотр | Kωzmin с | Knymin |
| 0,4 | -3,47 | 3,257 | 10,69 | 1,759318 | 7,201061 | 9,118081 | 7,201061 | 1,759318 | |
| 0,5 | -3,47 | 4,121 | 6,86 | 0,914302 | 4,544299 | 3,682255 | 4,544299 | 0,914302 | |
| 0,6 | -3,49 | 5,027 | 5,71 | 0,641317 | 3,714337 | 2,081984 | 3,714337 | 0,641317 | |
| 0,7 | -3,51 | 5,513 | 6,95 | 0,276522 | 3,46549 | 2,026486 | 3,46549 | 0,276522 | |
| 0,8 | -3,55 | 6,044 | 7,91 | 0,132222 | 3,033244 | 1,881977 | 3,033244 | 0,132222 |
По полученным значениям коэффициентов строятся графики в функции скоростного напора q=ρV2/2 для всех режимов полета. Обычно требуемые зависимости  аппроксимируют простыми в реализации функциями. Поэтому выбираются настройки (программы коррекции) в классе кусочно-линейных функций, причем желательно проводить их по нижним точкам.
аппроксимируют простыми в реализации функциями. Поэтому выбираются настройки (программы коррекции) в классе кусочно-линейных функций, причем желательно проводить их по нижним точкам.
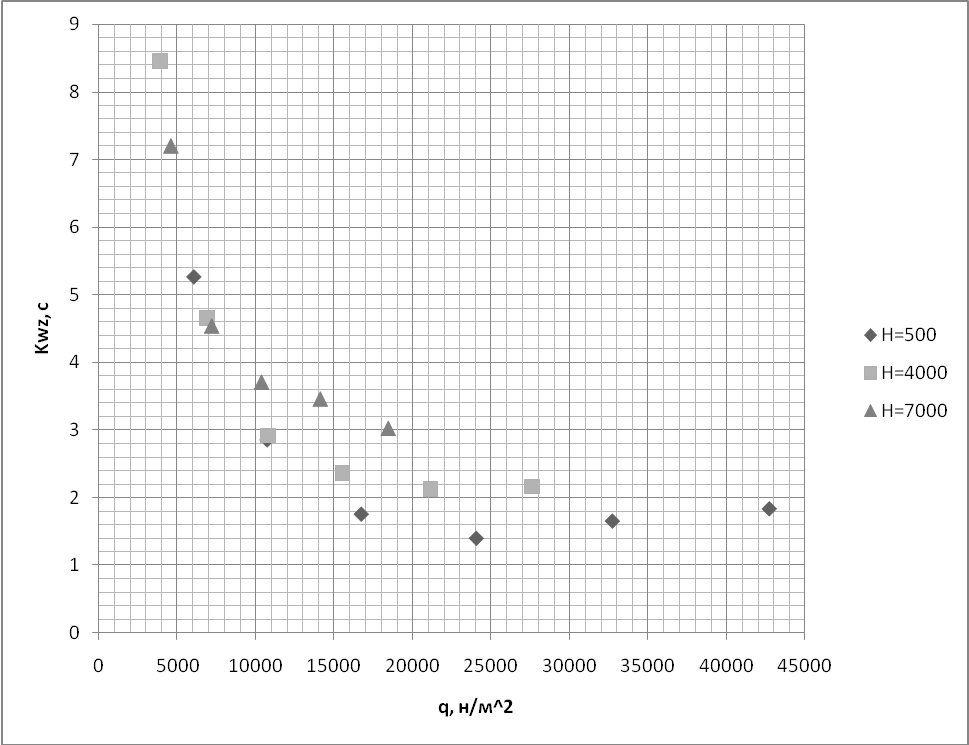
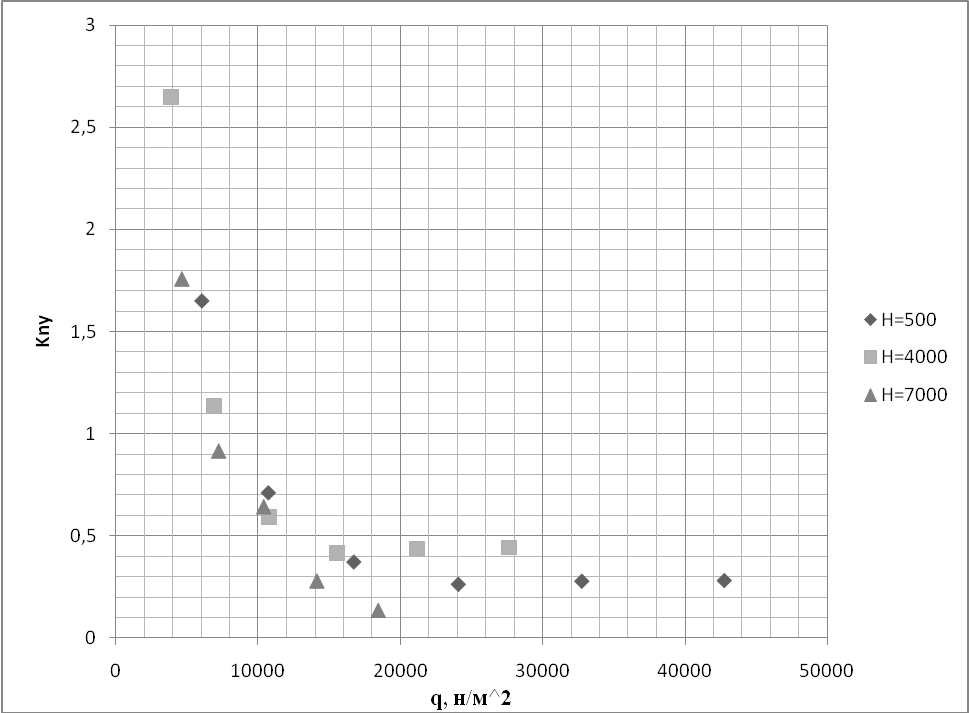
Рис. 9 Зависимость коэффициентов усиления.
Затем для выбранных настроек определяются эффективные значения параметров замкнутой системы “самолет+СУУ”:
1. опорная частота колебаний
 ;
;
2. относительный коэффициент демпфирования
 .
.
Все полученные значения сводятся в таблицу, причем каждому режиму полета соответствует своя расчетная точка (расчетные точки нумеруют по возрастанию величины скоростного напора).
Таблица 6. Результат расчета по выбору коэффициентов усиления АПУ.
H=500м
| M | q, н/
| Kωz*, с | Kny* | ωэф, 1/с | ζэф, с |
| 0,3 | 4,6 | 1,12 | 3,1847564 | 1,001875 | |
| 0,4 | 3,6 | 0,71 | 4,4499063 | 0,989997 | |
| 0,5 | 2,45 | 0,28 | 4,6014359 | 1,035251 | |
| 0,6 | 1,82 | 0,285 | 5,6971076 | 0,780099 | |
| 0,7 | 1,85 | 0,29 | 5,7828149 | 0,67751 | |
| 0,8 | 1,9 | 0,3 | 6,0632096 | 0,608032 |
H=4000м
| M | q, н/
| Kωz*, с | Kny* | ωэф, 1/с | ζэф, с |
| 0,3 | 4,6 | 1,12 | 2,0782912 | 0,996427 | |
| 0,4 | 4,6 | 1,12 | 3,5301791 | 1,008543 | |
| 0,5 | 3,6 | 0,7 | 4,3568147 | 0,998461 | |
| 0,6 | 2,65 | 0,28 | 3,8885646 | 1,023714 | |
| 0,7 | 1,8 | 0,29 | 3,7665501 | 0,663471 | |
| 0,8 | 1,82 | 0,295 | 3,9213109 | 0,594139 |
H=7000м
| M | q, н/
| Kωz*, с | Kny* | ωэф, 1/с | ζэф, с |
| 0,4 | 4,6 | 1,12 | 2,3738571 | 1,003864 | |
| 0,5 | 4,25 | 1,02 | 3,440507 | 0,984026 | |
| 0,6 | 3,7 | 0,75 | 3,8890521 | 0,922447 | |
| 0,7 | 0,4 | 3,0249228 | 0,841339 | ||
| 0,8 | 2,19 | 0,28 | 2,6510789 | 0,680239 |
Значения ωэф и ξэф, найденные для всего расчетного диапазона высот и скоростей, наносятся на область хорошей устойчивости и управляемости ω0(ξ0) для самолета данного класса, после чего делаются выводы о том, насколько улучшились характеристики устойчивости и управляемости после установки на самолет полуавтоматической системы управления. Если “выпадение” точек за границы области все еще имеет место, следует проанализировать, сколько процентов точек “выпадает” и какие значения Н и М им соответствуют, затем дать рекомендации по устранению этого явления (например, пересмотреть параметры горизонтального оперения для повышения его эффективности).
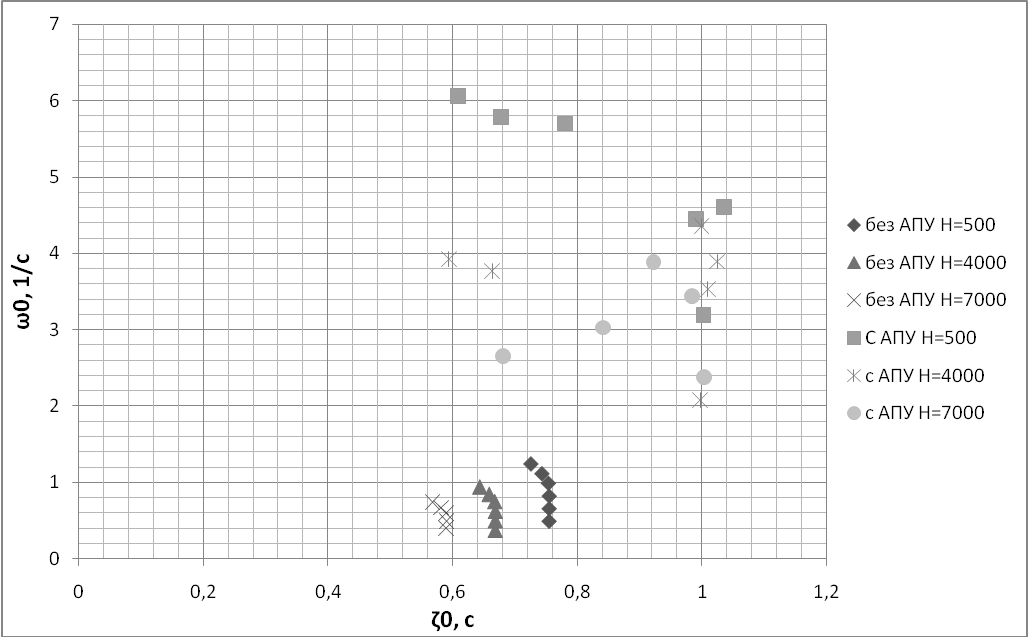
Рис. 10 Области хорошей устойчивости и управляемости с АПУ.
Вывод:
После установки АПУ характеристики сместились в область хорошей устойчивости и управляемости, однако остались точки, не попавшие в туда, это связано с использованием в расчете располагаемых коэффициентов. Для перемещения точек в область хорошей управляемости необходимо, чтобы Кωz и Кny минимальные равнялись потребным значениям. Это возможно произвести, уменьшив Тсп и внедрением в систему автомат регулирования управления (АРУ). Для устранения методической ошибки следует ввести в АРУ корректировку по высоте и скоростному напору.








