 2015-10-16
2015-10-16 2968
2968Внешний вид блока представлен на рис. 6.
Блок датчиков линейных ускорений БДЛУ-0,5 предназначен для измерения линейных ускорений и выдачи электрических сигналов, величина которых пропорциональна линейному ускорению, действующему вдоль оси чувствительности.
Блок БДЛУ-0,5 представляет собой трехканальный блок датчиков, каждый канал состоит из следующих основных узлов:
(1) Датчик линейных ускорений ДЛУ ВЧ2.
(2) Усилитель обратной связи.
(3) Блок питания МУБП-1-1.
Рис.6. Блок датчиков линейных ускорений БДЛУ-0,5
Основные технические данные блока
(1) Блок работает от однофазного источника переменного тока напряжением 36 +1,8-3,6 В 400±8 Гц.
(2) Время готовности блока не более 10 с.
(3) Порог чувствительности от диапазона измерения (0,5g) не более 0,1%.
При этом изменение выходного сигнала относительно нулевого сигнала не менее 0,006 В.
(4) Выходной сигнал при отсутствии линейного ускорения (нулевой сигнал) не более ±0,05 В.
(5) Диапазон измерения 0,5g.
(6) Масса блока 1,5 кГ±15%.
Принцип действия блока основан на свойстве свободного маятника устанавливаться по направлению результирующих сил, действующих на него в направлении, перпендикулярном оси подвеса маятника.
Электрокинематическая схема блока датчика линейных ускорений представлена на рис. 7. Габаритные и установочные размеры даны на рис. 8.
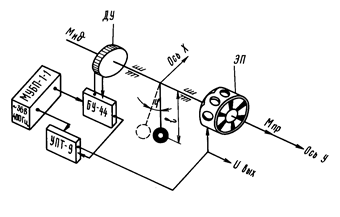
Миd Инерционный момент
ДУ Датчик угловых отклонений
ЭП Электрическая пружина
Мпр Противодействующий момент пружины
Uвых Выходной сигнал датчика линейных ускорений
МУБП-1-1 Блок питания
БУ-44 Блок усилителя.
УПТ-9 Усилитель постоянного тока
X. Входная ось прибора
У. Выходная ось прибора
Рис.7. Электрокинематическая схема БДЛУ-0,5
При действии линейных ускорений, направленных по входной оси Х датчика, возникает инерционный момент, отклоняющий маятник от положения равновесия относительно оси.
Х - входная ось прибора. У - выходная ось прибора.
Отклонение маятника относительно оси У преобразуется датчиком угловых отклонений в электрический сигнал. Сигнал с датчика поступает на вход амплитудного фазочувствительного детектора усилителя БУ-44-2-11, преобразуется в напряжение постоянного тока определенной полярности и через усилитель УПТ-9 подается на электрическую пружину датчика линейных ускорений. Электрическая пружина создает момент, пропорциональный току, который компенсирует момент инерционных сил, действующих на массу маятника.
Под действием инерционного момента подвижная часть стремится отклониться от среднего положения. Этому препятствует противодействующий момент пружины.
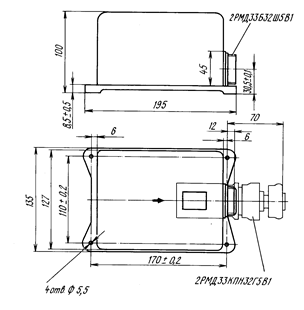
Рис.8. Габаритные и установочные размеры блока БДЛУ-0,5
При достижении равенства инерционного момента и момента пружины отклонение подвижной части прекратится. В катушке моментного датчика будет течь ток, величина которого пропорциональна действующему линейному ускорению (перегрузке).
Питание обмотки возбуждения датчика угловых отклонений осуществляется с помощью блока усилителя БУ-44. Кроме того, блок усилителя БУ-44 производит выпрямление выходного сигнала, поступающего с датчика угловых отклонений обеспечивает необходимые статические и динамические характеристики всего комплекта блока.
Усиление выпрямленного сигнала производится с помощью усилителя постоянного тока УПТ-9. Усилители БУ-44 и УПТ-9 образуют усилитель обратной связи, питание которого осуществляется от блока питания МУБП-1-1.








