 2015-10-13
2015-10-13 756
756Силу инерции альтернативной связки шатун/поршень можно считать состоящей из двух сил:
· Первичная сила инерции связана с движением поршня, без учета воздействия факторов, связанных с наклоном шатуна.
· Вторичная сила инерции связана с изменением наклона шатуна
Частота первичной инерции равна скорости вращения двигателя. Она может быть частично уравновешена путем монтажа противовеса на коленчатом валу.
Частота вторичной силы инерции вдвое превышает скорости вращения двигателя. Она не может быть уравновешена простым устройством, помешенным на коленчатом валу. Противовес, расположенный на руле, уменьшает первичную силу инерции, которая направлена по оси цилиндра, но он вводит перпендикулярно этой оси новую силу. В конце концов, если полностью устранять первичную силу инерции, то нужно ввести в перпендикулярном направлении другую силу, которая имеет точно такую же интенсивность. Следовательно, на моноцилиндре не устраняется первичная сила инерции, он перераспределяется в вертикальном направлении. Фактор равновесия – это процент первичной силы, который уравновешен противовесом (или, более точно говоря, перераспределен).
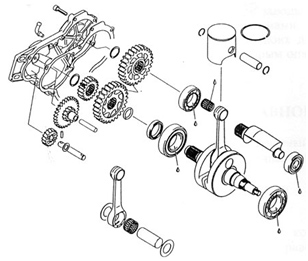
На этом рисунке четко виден вал равновесия мотора RotaxMax.
Привод осуществляется с помощью зубчатых колес, а «маятник» вращается в направлении, противоположном коленчатому валу.
Нулевой фактор соответствует максимальной силе в оси цилиндра и нулевой силе в перпендикулярном направлении. Фактор, равный 100, соответствует нулевой силе в оси цилиндра и максимальной в перпендикулярном направлении. В двигателе для туристического карта Rotax Max используется тот же принцип, что и для некоторых моторов мотоциклов. Вал равновесия с контргрузом вращается параллельно коленчатому валу и в противоположном направлении от него; созданные вибрации имеют противоположное направление тем, которые генерированы коленчатым валом и их более или менее аннулируют. Это устройство позволяет уравновесить большую часть сил инерции, созданных альтернативной экипировкой в оси цилиндра и уменьшить силу, индуцированную в направлении, перпендикулярном цилиндру, весами равновесия.
Можно было бы предположить, что надо уравновешивать двигатели с фактором 50%. На самом деле, надо учитывать, что двигатель монтирован на шасси, которое обладает самоамортизирующими свойствами, весьма различными в зависимости от направления и частоты сил, которые к нему приложены. Следовательно, при выборе лучшего фактора равновесия используется и часть эмпирического опыта. Выбор зависит от двигателя, от шасси, от типа крепления двигателя на шасси. Крепления двигателя теперь хорошо разработаны и практически одинаковые на всех шасси, что упрощает работу мотористов. Но так было не всегда. Этим объясняется эпидемия поломок коленчатого вала на шасси одной марки несколько лет тому назад. Можно считать, что в случае большого изменения веса альтернативной экипировки, надо будет изменять вес масс равновесия для того, чтобы снова найти изначальный фактор равновесия.
При резком изменении режима использования надо будет поискать новый адаптированный фактор равновесия. Это означает, что в зависимости от режима, который наиболее часто достигается на данной трассе, надо будет поискать адаптированное равновесие. Здесь мы входим в очень сложные области эксперементирования, требующие особого оборудования, которое не всем по карману.
По мере улучшения качества материалов и методов обработки заводы заставили свои двигатели вращаться все быстрее со все более высокими диаграммами. В то же самое время они эксперементировали и изменяли фактор равновесия своих двигателей, что на первый взгляд не всегда очевидно. Это одна из причин, по которым опасно копировать на старых двигателях диаграммы, используемые в настоящее время.








