 2015-10-22
2015-10-22 1412
14122.1. Исходные данные:
1. Схема кривошипно-ползунного механизма двигателя внутреннего сгора-ния представлена на рис. 2.1. Звенья механизма обозначены следующим образом: 1 –кривошип ОА; 2 –шатун АВ; 3 –ползун.Крайние положения ползуна обозна-чены В0 и В6;
2. Параметры кинематической схемы механизма приведёны в таблице 2.1; 3. Угловая координата 1, определяющая положение начального звена ОА в расчётном положении механизма, выбирается из таблицы 2.2 в зависимости от предпоследней цифры шифра. Направление угловой скорости начального звена
1 совпадает с указанным направлением роста угла 1.
2.2. Необходимо выполнить следующее:
1. Произвести структурный анализ кривошипно-ползунного механизма двигателя внутреннего сгорания, т.е. определить число подвижных звеньев, число кинематических пар, число степеней свободы механизма. Разбить механизм на начальное звено 1 со стойкой и структурную группу, образованную звеньями
2 и 3;
2. Определить размеры lOA и lAB звеньев механизма;
3. Построить три плана положения механизма, два из которых соответст-вуют нижнему и верхнему крайним положениям ползуна 3, и одно расчётное по-
ложение для заданного угла 1;
4. Определить величину средней угловой скорости кривошипа ОА;
5. Используя стандартные масштабы, построить для заданного угла 1 план скоростей и план ускорений механизма. Определить для расчётного положения
механизма величины перемещения SВ, скорости VВ и ускорения aВ ползуна 3;
6. Используя аналитический метод, определить для 12-ти положений меха-низма перемещение SВ, скорость VВ и ускорение aВ точки В ползуна 3. Интервал изменения угла 1 при этом принять равным 30о. Включить определение пара-метров SВ, VВ, и aВ для расчётного положения механизма. Построить графики пе-ремещения SВ(1), скорости VВ(1) и ускорения aВ(1) ползуна в зависимости от угла поворота кривошипа 1;
7. Сравнить между собой результаты определения перемещения SВ, скоро-сти VВ и ускорения aВ точки В ползуна 3, найденные для расчётного положения
механизма аналитическим и графическим методами.
| 3 | В6 | ||
| В | h | ||
| 2 | В0 | ||
| А | 1 | A6 | |
| О | |||
| 1 | |||
| A |
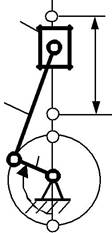 Рис. 2.1. Схема кривошипно-ползунного механизмадвигателя внутреннего сгорания
Рис. 2.1. Схема кривошипно-ползунного механизмадвигателя внутреннего сгорания
Таблица 2.1
Варианты параметров механизма
| Параметры | Варианты задания (последняя цифра шифра) | ||||||||||||||||||||
| механизма | |||||||||||||||||||||
| h0,м | 0,10 | 0,11 | 0,12 | 0,13 | 0,14 | 0,15 | 0,16 | 0,17 | 0,18 | 0,19 | |||||||||||
| h, м | h = h 0 | + 0,001 N | |||||||||||||||||||
| Vср, м/с | 9,50 | 9,00 | 8,50 | 8,00 | 7,50 | 7,00 | 6,50 | 6,00 | 5,50 | 5,00 | |||||||||||
| 0,23 | 0,24 | 0,25 | 0,26 | 0,27 | 0,28 | 0,23 | 0,24 | 0,25 | 0,26 | ||||||||||||
| В таблице | 2.1 | приняты следующие обозначения параметров механизма: | |||||||||||||||||||
| h 0базовый ход ползуна; | |||||||||||||||||||||
| h –ход ползуна; | |||||||||||||||||||||
| N величина,зависящая от года поступления в институт,выбирается из | табли- | ||||||||||||||||||||
| цы 0; | |||||||||||||||||||||
| Vср средняя скорость ползуна; | |||||||||||||||||||||
| = lOA / lAB | отношение длины кривошипа lOA к длине шатуна lAB. | Таблица 2.2 | |||||||||||||||||||
| Варианты угловой координаты механизма | |||||||||||||||||||||
| Угловая | Варианты числовых значений (предпоследняя цифра шифра) | ||||||||||||||||||||
| координата | |||||||||||||||||||||
| , град. | |||||||||||||||||||||
| 1 |

