2015-10-22
2015-10-22 588
588Рассмотрим уравнения, связывающие скорости, а также ускорения точек звеньев плоского рычажного механизма для случая, при котором две точки А и В принадлежат одному звену и лежат на расстоянии lАВ друг от друга, как это пока-зано на рис. 2.2.
| VBA | VB | аBA | аtBA | |
| В | aB | B | ||
| А | VA | А | aА | |
| аnBA | ||||
| VА | aА | |||
| Рис. 2.2. Скорости | Рис. 2.3. Ускорения | |||
| точек А и В звена | точек А и В звена |
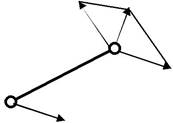
Движение звена АВ можно разложить на переносное поступательное движение вместе с точкой А и относительное вращение звена вокруг точки А. Тогда скорость точки В можно определить векторной суммой:
VB = VA + VBA,
АВ
где VA – скорость точки А в переносном поступательном движении звена;
VBA – скорость точки В при вращении звена вокруг точки А (направлена перпендикулярно АВ).
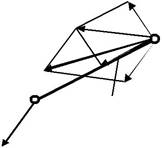
Ускорение точки В определяется векторной суммой:
аВ = аА + аnВА + аtВА,
ВА АВ
где аА – ускорение точки А;
аnВА и аtВА нормальное и тангенциальное ускорения точки В при вращениизвена вокруг точки А (аnВА направлено от точки В к точке А, т.е. параллельно АВ, аtВА –перпендикулярно АВ).
Величина ускорения аnВА определяется формулой
аnВА = V2ВА / lАВ.
Ускорения точек А и В звена показаны на рис. 2.3.