 2017-12-14
2017-12-14 2659
2659
Электрические ИМ (ЭИМ) получили наибольшее распространение. Они бывают постоянной и переменной скорости, шаговые.
По характеру перемещения выходного органа электрические ИМ подразделяют на: однооборотные; многооборотные и прямоходные с поступательным движением выходного органа.
Обычно электрические ИМ состоит из электродвигателя, редуктора, аппаратуры управления и контроля, а также приставки, формирующей перемещение выходного вала.
Для улучшения динамических характеристик и фиксации выходного вала электрические ИМ применяют тормоз.
Обратную связь и контроль положения выходного вала осуществляют датчиком положения.
Для управления электрических ИМ используют контактные и бесконтактные системы. В первом случае управление трехфазным асинхронным электродвигателем осуществляют посредством релейно-контактной аппаратуры, а во втором преимущественно используют тиристорное управление специальными двухфазными конденсаторными электродвигателями.
Передаточная функция асинхронного трехфазного двигателя совпадает с передаточной функцией инерционного звена.


а – с трехфазным асинхронным электрическим двигателем; б –с однофазным конденсаторным электрическим двигателем
Рисунок – Схемы управления электрическим ИМ
Маркировка электродвигательных исполнительных механизмов имеет следующее обозначение:

Пример маркировки: МЭО-6,3/25-0,25.
Электромагнитные ИМ

Электромагнитные ИМ представляют собой соленоиды и электромагнитные муфты.
Соленоидный ИМ – это катушка, втягивающее усилие которой при подаче управляющего сигнала U перемещает якорь на расстояние S, преодолевая сопротивление пружины. Они отличаются простотой конструкции, высокой надежностью, небольшими размерами и массой. Их используют в схемах двухпозиционного управления. Регулирующий орган при этом занимает два устойчивых положения – "Открыто" и "Закрыто".
Статическая характеристика электромагнитных ИМ, как правило, нелинейная, и их используют в системах позиционного регулирования.
Электромагнитные муфты могут быть фрикционными, порошковыми или асинхронными. Фрикционная муфта состоит из двух полумуфт, посаженных на ведущий и ведомый валы. В одной из полумуфт расположена обмотка возбуждения. При подаче на нее напряжения полумуфты сдвигаются и возникающая сила трения приводит их в движение. Такие муфты также применяют в системах позиционного регулирования и защиты оборудования при аварийных нарушениях его работы.
Принцип действия порошковой муфты основан на изменении вязкости ферромагнитной массы, заполняющей муфту. При подаче на катушку напряжения вязкость ферромагнитной массы возрастает и передаваемый момент увеличивается.
В муфтах скольжения момент вращения передается посредством магнитного поля, создаваемого обмоткой, расположенной на ведущей полумуфте. При ее вращении в ведомой полумуфте, как в роторе асинхронного двигателя, индуцируется ток, от взаимодействия которого с магнитным полем возникает момент вращения, увлекающий ведомую полумуфту за ведущей.
Порошковые и асинхронные электромагнитные муфты могут быть использованы и в системах непрерывного регулирования. В этом случае их характеризует ПФ инерционного звена с постоянной времени 0,03...0,25 с (для порошковых) и 0,11...0,45 с (для асинхронных муфт).
Лекция 7
Вопросы:
1. Общие сведения о РО
2. Регулирующие органы объемного типа
3. Регулирующие органы скоростного типа
4. Регулирующие органы дроссельного типа
Общие сведения о РО
Устройство, позволяющее изменять направление или расход потока вещества или энергии в соответствии с требованиями ТП, называют регулирующим органом (РО).
Работоспособность РО определяется его характеристиками: диапазоном регулирования и рабочей расходной характеристикой.
Отношение максимального расхода среды G mах к минимальному Gmin, соответствующему перемещению РО из одного крайнего положения hminв другое h max,называют диапазоном регулирования
R = G max/ G min
Зависимость расхода среды от положения РО h называют рабочей расходной характеристикой
G=f (h)
При разработке, выборе и наладке РО для обеспечения возможности эффективного управления ТП в широком диапазоне нагрузок и при разных режимах следует обеспечить достаточный диапазон регулирования и линейную рабочую характеристику в пределах этого диапазона. Используемые в сельскохозяйственном производстве РО можно разделить на три группы – регулирующие органы объемного типа, регулирующие органы скоростного типа и регулирующие органы дроссельного типа.

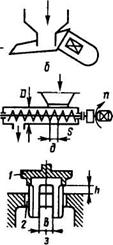

а – ленточный питатель (объемный); б – вибрационный питатель; в – ленточный питатель (скоростной); г – тарельчатый питатель; д – шнековый питатель; е – секторный питатель; ж – тарельчатый клапан; з – золотниковый клапан; и – поворотная заслонка
Рисунок – Регулирующие органы:








